Sada rotačního enkodéru Netzer Precision VLP-247 Kodér s dutým hřídelem
Specifikace
- Úhlové rozlišení: 18-20 bitů
- Nominální přesnost polohy: ±0.006°
- Maximální provozní rychlost: 4,000 ot./min
- Rozsah měření: Jedno otočení, neomezeně
- Směr otáčení: Nastavitelné CW/CCW*
- Vestavěný testovací BIT: Volitelný
- * Výchozí stejný směr ze spodní strany kodéru
Informace o produktu
VLP-247 Absolute Hollow Shaft Rotary Encoder Kit Kit Encoder je přesný enkodér navržený pro aplikace v drsném prostředí. Na základě kapacitní technologie vyvinuté společností Netzer Precision Position Sensors je tento kodér postaven tak, aby splňoval požadavky náročných aplikací.
Návod k použití produktu
Mechanická montáž
Podrobné pokyny k montáži kodéru najdete v části Mechanická montáž v uživatelské příručce. Pro správnou instalaci dodržujte pokyny pro instalaci na konci hřídele.
Provozní režim
Kodér pracuje v režimu SSi / BiSS. Konkrétní pokyny pro konfiguraci a provoz kodéru v těchto režimech naleznete v uživatelské příručce.
FAQ
- Otázka: Jaká je maximální provozní rychlost VLP-247 kodér?
A: Maximální provozní rychlost kodéru VLP-247 je 4,000 XNUMX ot./min. - Otázka: Jak dlouho se používá kapacitní technologie ve VLP? série byla vyvinuta?
Odpověď: Kapacitní technologie používaná v řadě VLP byla vyvíjena a zdokonalována více než 20 let společností Netzer Precision Position Sensors.
Úvod do kodérů VLP
Navrženo tak, aby splňovalo požadavky nejnáročnějších aplikací
Řada elektrických kodérů VLP™ je řada kodérů navržených pro aplikace v drsném prostředí. Tyto snímače jsou založeny na kapacitní technologii, která byla více než 20 let vyvíjena a zdokonalována společností Netzer Precision Position Sensors.
Kodéry VLP se vyznačují následujícími vlastnostmi, které je odlišují od jiných podobných kodérů:
- Nízký profile
- Dutý hřídel (stator / rotor)
- Žádná ložiska ani jiné kontaktní prvky
- Vysoké rozlišení a vynikající přesnost
- Imunita vůči magnetickým polím
- Vysoká odolnost vůči teplotním extrémům, nárazům, vlhkosti, EMI, RFI
- Velmi nízká hmotnost
- Holistické generování a snímání signálu
- Digitální rozhraní pro absolutní polohu
Holistická struktura VLP Electric Encoder™ jej činí jedinečným. Jeho výstupní údaj je zprůměrovaný výsledek celé obvodové oblasti rotoru. Tato inherentní konstrukční charakteristika poskytuje kodéru VLP vynikající přesnost a tolerantní mechanickou montáž. Absence součástí, jako jsou kuličková ložiska, flexibilní spojky, skleněné kotouče, světelné zdroje a detektory, spolu s velmi nízkou spotřebou energie umožňují kodérům VLP poskytovat prakticky bezporuchový výkon.
Technické specifikace
Generál
| Úhlové rozlišení | 18-20 bitů |
| Nominální přesnost polohy | ±0.006° |
| Maximální provozní rychlost | 4,000 ot./min |
| Rozsah měření | Jedno otočení, neomezeně |
| Směr otáčení | Nastavitelné CW/CCW* |
| Vestavěný testovací BIT | Volitelný |
* Výchozí stejný směr ze spodní strany kodéru
Mechanické
| Přípustná montážní excentricita | ±0.1 mm |
| Povolená axiální montážní tolerance | ±0.3 mm |
| Setrvačnost rotoru | 876,053 2 gr · mmXNUMX |
| Celková hmotnost | 220 gr |
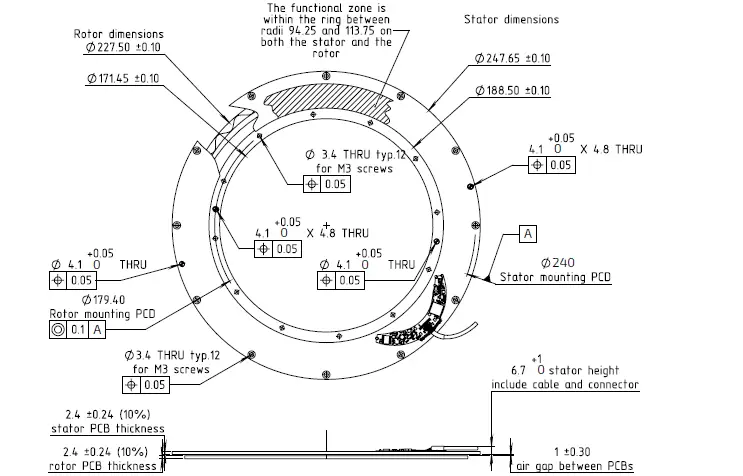
| Vnější Ø / Vnitřní Ø / Výška | 247 / 171 / 9 mm |
| Materiál (stator / rotor) | FR4 |
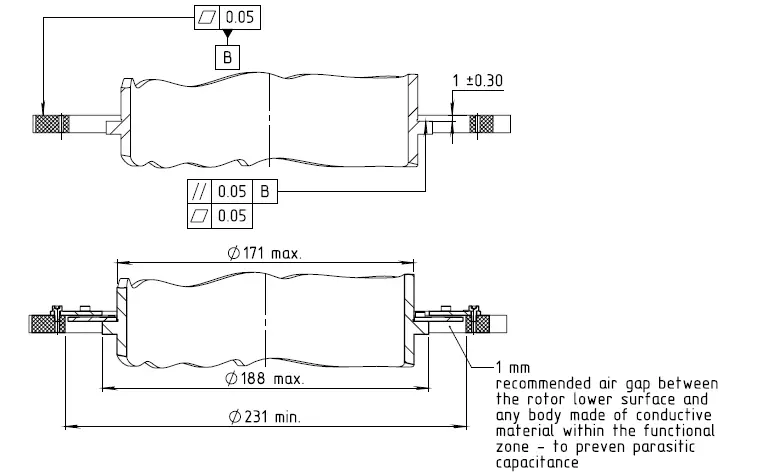
| Jmenovitá vzduchová mezera (stator, rotor) | 1 mm |
Elektrický
| Napájecí objemtage | 5 V ± 5% |
| Aktuální spotřeba | ~90 mA |
| Propojení | Kabel (standardní 250 mm) |
| Sdělení | SSi, BiSS-C |
| Sériový výstup | Diferenciál RS-422 |
| Frekvence hodin | 0.1-5.0 MHz |
| Rychlost aktualizace pozice | 35 kHz (volitelné – až 375 kHz) |
Environmentální
| EMC | IEC 6100-6-2, IEC 6100-6-4 |
| Provozní teplota | -40°C až +105°C |
| Skladovací teplota | -55°C až +125°C |
| Relativní vlhkost | 98 % Bez kondenzace |
| Nárazová odolnost / funkční | 100 g pilového zubu 6 ms na IEC 60068-2-27:2009 40 g 11 ms pilového zubu na MIL-810G |
| Vibrace funkční | 7.7 grms při 20 až 2000 Hz na MIL-810G kategorie 24 |
| Ochrana | IP 40 |
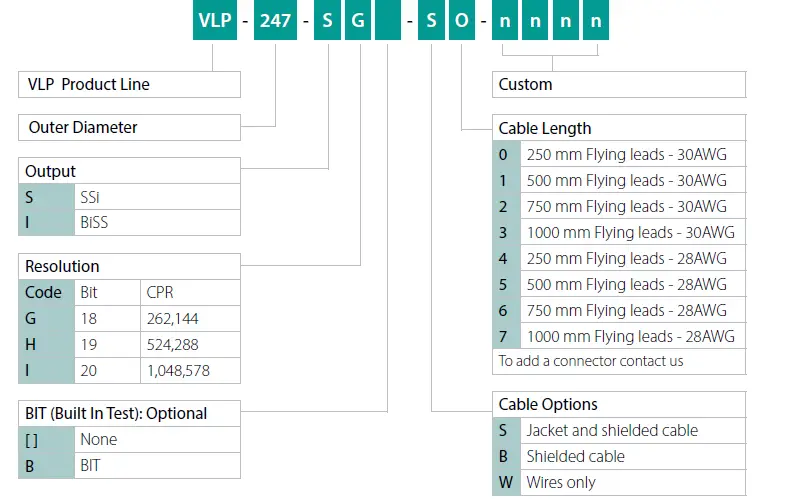
Objednací kód
Mechanické výkresy
Pokud není uvedeno jinak
- Rozměry jsou v: mm Povrchová úprava: N6
Lineární tolerance
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Výkres ovládání mechanického rozhraní
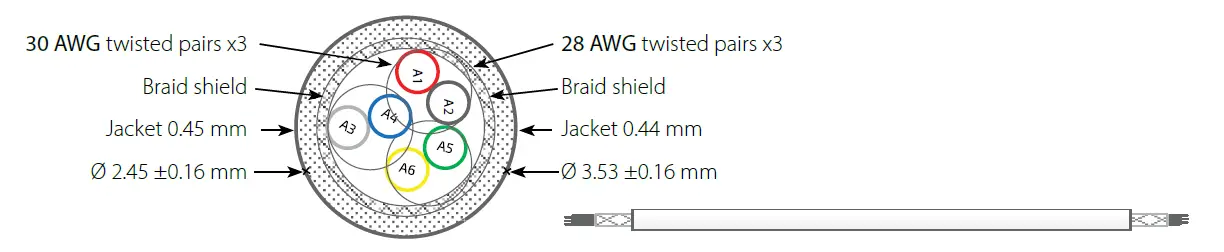
Možnosti kabelu
| Netzer Cat No. | CB 00014 | CB 00034 |
| Typ kabelu | 30 AWG kroucený pár x 3 | 28 AWG kroucený pár x 3 |
| Typ drátu | 2 x 30 AWG 25/44 pocínovaná měď Izolace: PFE Ø 0.15 Vnější průměr: Ø 0.6 ± 0.05 mm |
2 x 30 AWG 40/44 pocínovaná měď Izolace: PFE Ø 0.12 Vnější průměr: Ø 0.64 ± 0.05 mm |
| Temp. Hodnocení | -55°C až +150°C | |
| Pletený štít | Ředěná měděná opletení 95% min. Dosah | |
| Bunda | 0.45 silikonová pryž (NFA 11-A1) | 0.44 silikonová pryž (NFA 11-A1) |
| Průměr | Ø 2.45 ± 0.16 mm | Ø 3.53 ± 0.16 mm |
Skladování a manipulace
- Skladovací teplota: -55°C až +125°C
- Vlhkost: Až 98% bez kondenzace
ESD ochrana
Jako obvykle u elektronických obvodů se během manipulace s výrobkem nedotýkejte elektronických obvodů, vodičů, konektorů nebo senzorů bez vhodné ESD ochrany. Integrátor/operátor musí použít ESD zařízení, aby se vyhnul riziku poškození obvodu.
 POZOR DODRŽUJTE BEZPEČNOSTNÍ OPATŘENÍ PRO MANIPULACI S ELEKTROSTATICKÝMI ZAŘÍZENÍMI
POZOR DODRŽUJTE BEZPEČNOSTNÍ OPATŘENÍ PRO MANIPULACI S ELEKTROSTATICKÝMI ZAŘÍZENÍMI
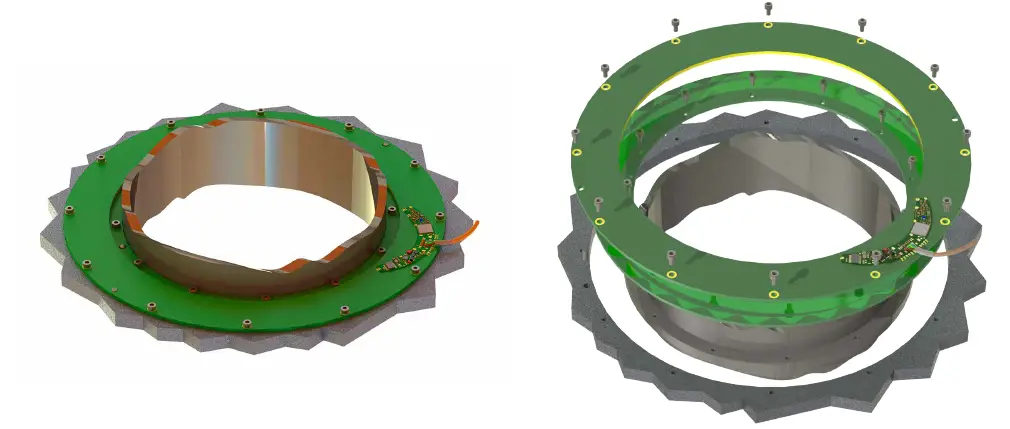
Konec produktuview
Nadview
VLP-247 Absolutní poloha Electric Encoder™ je rotační snímač polohy vyvinutý pro náročné aplikace. V současné době působí v široké škále aplikací, včetně obrany, vnitřní bezpečnosti, lékařské robotiky a průmyslové automatizace. Bezkontaktní technologie Electric Encoder™ poskytuje přesné měření polohy pomocí modulace elektrického pole. VLP-247 Electric Encoder™ je kit-kodér, tj. jeho rotor a stator jsou samostatné.
- Stator kodéru
- Rotor kodéru
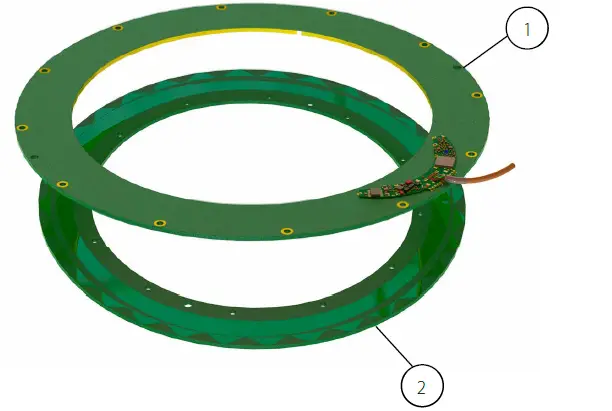
Vybalení – standardní objednávka
Balení standardního VLP-247 obsahuje kodér Stator & Rotor.
Volitelné příslušenství:
- CNV-0003, převodník RS-422 na USB (s USB interní napájecí cestou 5V).
- NanoMIC-KIT-01, převodník RS-422 na USB. Nastavení a provozní režimy přes rozhraní SSi/BiSS.
- RJ VLP-247 rotační přípravek
- DKIT-VLP-247-SG-S0, osazený SSi kodér na otočném přípravku, převodník RS-422 na USB a kabely.
- DKIT-VLP-247-IG-S0, BiSS kodér namontovaný na rotačním přípravku, převodník RS-422 na USB a kabely.
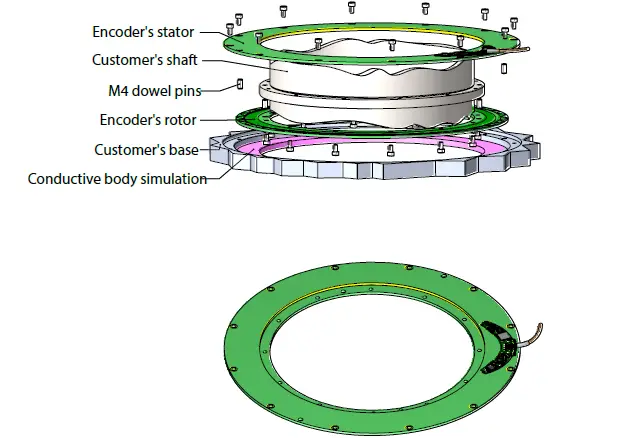
Schéma instalace
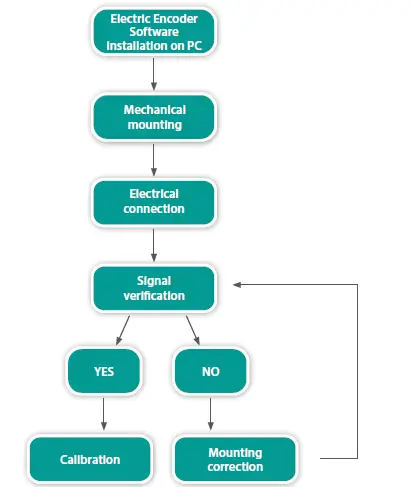
Instalace softwaru elektrického kodéru
Software Electric Encoder Explorer (EEE):
- Ověřuje správnou montáž pro dostatečný signál amplituda
- Kalibrace ofsetů
- Obecné nastavení a analýza signálu
Tato část popisuje kroky spojené s instalací softwarové aplikace EEE.
Minimální požadavky
- Operační systém: MS Windows 7/10, (32/64 bit)
- Paměť: minimálně 4 MB
- Komunikační porty: USB 2
- Windows .NET Framework, minimálně V4
Instalace softwaru
- Spusťte Electric Encoder™ Explorer file nalezený na Netzer webmísto: Encoder Explorer Software Tools
- Po instalaci se na ploše počítače zobrazí ikona softwaru Electric Encoder Explorer.
- Začněte kliknutím na ikonu softwaru Electric Encoder Explorer.
Mechanická montáž
Montáž snímače – instalace na konci hřídele
Typické použití instalace kodéru
- Montážní šrouby Šroub s válcovou hlavou 12xM2, po 6 na stator a rotor.
- Montážní kolíky 4xØ2, po 2 na stator a rotor (nejsou součástí kodéru).
Relativní poloha statoru kodéru / rotoru
Pro správnou funkci by měla být vzduchová mezera 1 mm ± 0.3 mm
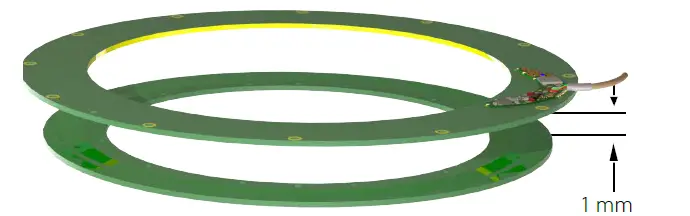
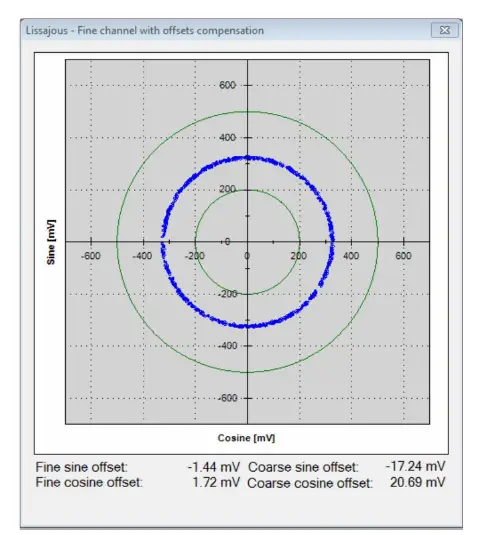
Při optimální montáži je signál ampHodnoty nadmořské výšky generované kodérem by byly uprostřed rozsahu grafu signálu zobrazeného v softwaru Encoder Explorer (viz graf níže). To se může lišit podle typu kodéru. Ověřte správnou montáž rotoru pomocí nástrojů Encoder Explorer „Analyzátor signálu“ nebo „Proces ověření signálu“.
Poznámka: pro více informací si přečtěte část 7
Elektrické připojení
Tato kapitola je znovuviews kroky potřebné pro elektrické připojení kodéru s digitálním rozhraním (SSi nebo BiSS-C).
Připojení kodéru
Kodér má dva provozní režimy:
Absolutní poloha nad SSi nebo BiSS-C
Toto je výchozí režim při zapnutí
Barevný kód vodičů rozhraní SSi / BiSS
| Hodiny + | Šedá | Hodiny |
| Hodiny – | Modrý | |
| údaje – | Žluť | Data |
| Data + | Zelený | |
| GND | Černý | Země |
| +5V | Červený | Napájení |
Parametry výstupního signálu SSi / BiSS
| Výstupní kód | Binární |
| Sériový výstup | Diferenciál RS-422 |
| Hodiny | Diferenciál RS-422 |
| Frekvence hodin | 0.1-5.0 MHz |
| Rychlost aktualizace pozice | 35 kHz (volitelné – až 375 kHz) |
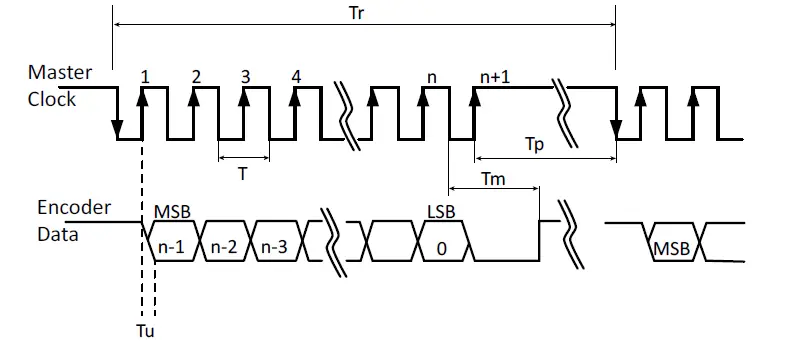
Digitální rozhraní SSi
Synchronní sériové rozhraní (SSi) je standard sériového rozhraní typu point-to-point mezi hlavním (např. kontrolérem) a podřízeným zařízením (např. senzor) pro digitální přenos dat.
Možnost vestavěného testu (BIT)
BIT indikuje kritickou abnormalitu ve vnitřních signálech kodéru.
„0“ – interní signály jsou v normálních mezích, „1“ – chyba
Číslo dílu kodéru udává, zda kodér obsahuje BIT. Pokud není v PN uveden žádný BIT, neexistuje žádný další chybový bit.
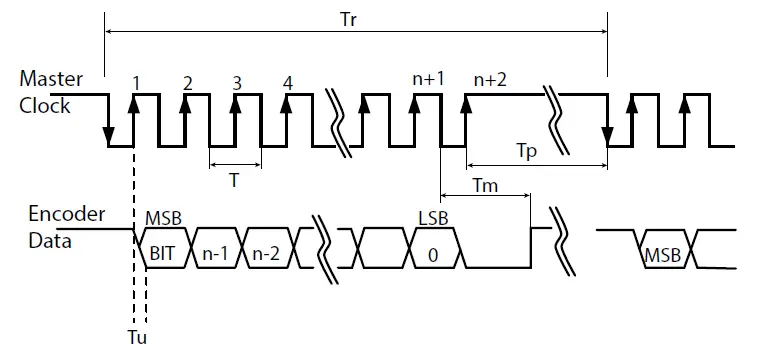
| Popis | Doporučení | |
| n | Rozlišení polohy | 12-20 |
| T | Období hodin | |
| f = 1/T | Frekvence hodin | 0.1-5.0 MHz |
| Tu | Čas aktualizace bitu | 90 ns |
| Tp | Čas pauzy | 26 – ∞ μsec |
| Tm | Čas monoflopu | 25 μs |
| Tr | Čas mezi 2 sousedními požadavky | Tr > n*T+26 μs |
| fr=1/Tr | Frekvence žádostí o data |
Digitální rozhraní BiSS-C
Rozhraní BiSS – C je jednosměrný sériový synchronní protokol pro přenos digitálních dat, kde kodér funguje jako „slave“ a přenáší data podle hodin „Master“. Protokol BiSS je navržen v režimu B a režimu C (kontinuální režim). Rozhraní BiSS-C jako SSi je založeno na standardech RS-422.
Možnost vestavěného testu (BIT)
BIT indikuje kritickou abnormalitu ve vnitřních signálech kodéru.
„1“ – interní signály jsou v normálních mezích, „0“ – chyba
Číslo dílu kodéru udává, zda kodér obsahuje BIT. Pokud není v PN uveden žádný BIT, chybový bit je vždy 1.
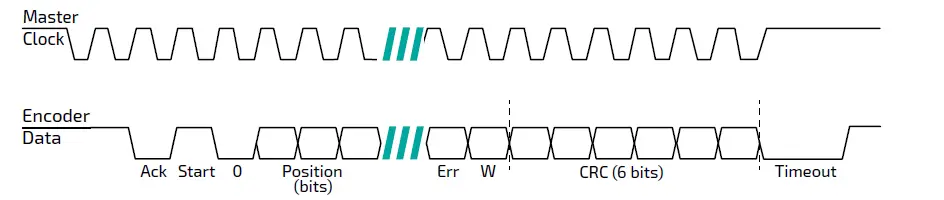
| Přidělení bitů na rozlišení kodéru | Popis Výchozí | Délka | |||||
| 17bit | 18bit | 19bit | 20bit | ||||
| 27 | 28 | 29 | 30 | Ack | Období, během kterého kodér vypočítává absolutní polohu, jeden hodinový cyklus | 0 | 1/hodiny |
| 26 | 27 | 28 | 29 | Start | Signál kodéru pro „start“ přenos dat | 1 | 1 bit |
| 25 | 26 | 27 | 28 | "0" | "Start" bit následovník | 0 | 1 bit |
| 8…24 | 8…25 | 8…26 | 8…27 | AP | Data kodéru absolutní polohy | Podle rozlišení | |
| 7 | 7 | 7 | 7 | Chyba | BIT (možnost vestavěného testu) | 1 | 1 bit |
| 6 | 6 | 6 | 6 | Varovat. | Upozornění (neaktivní) | 1 | 1 bit |
| 0…5 | 0…5 | 0…5 | 0…5 | CRC | Polynom CRC pro data o poloze, chybě a varování je: x6 + x1 + x0. Nejprve se vysílá MSB a invertuje se. Počáteční bit a bit „0“ jsou z výpočtu CRC vynechány. | 6 bitů | |
| Časový limit | Uplynutí mezi sekvenčními cykly požadavků „start“. | 25 μs | |||||
Režim nastavení přes NCP (Netzer Communication Protocol)
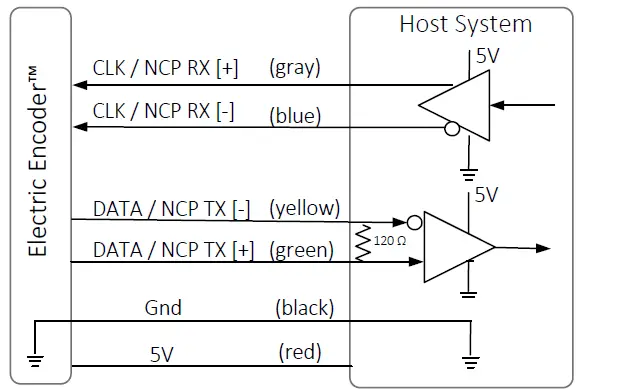
Tento servisní režim poskytuje přístup přes USB k PC s aplikací Netzer Encoder Explorer (na MS Windows 7/10). Komunikace probíhá přes Netzer Communication Protocol (NCP) přes RS-422 pomocí stejné sady vodičů. Pomocí následujícího přiřazení pinů připojte kodér k 9pinovému konektoru typu D k převodníku RS-422/USB CNV-0003 nebo NanoMIC.
Rozhraní elektrického kodéru, D Typ 9 pin samice
| Popis | Barva | Funkce | PIN č |
| Hodiny SSi / NCP RX | Šedá | Hodiny / RX + | 2 |
| Modrý | Hodiny / RX – | 1 | |
| SSi Data / NCP TX | Žluť | Data / TX – | 4 |
| Zelený | Data / TX + | 3 | |
| Země | Černý | GND | 5 |
| Napájení | Červený | +5V | 8 |
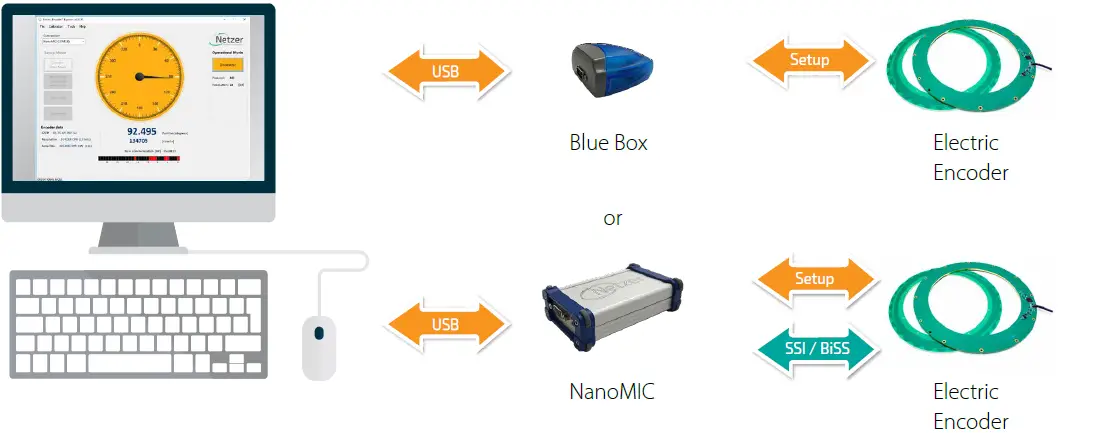
Připojte kodér Netzer k převodníku, připojte převodník k počítači a spusťte softwarový nástroj Electric Encoder Explorer
Elektrické připojení a uzemnění
Dodržujte následující úvahy o uzemnění:
- Stínění kabelu je standardně elektricky plovoucí (nepřipojené).
- Důrazně se doporučuje udržovat vodiče PWM motoru elektricky stíněné a/nebo je držet mimo enkodér.
Poznámka: Je vyžadováno napájení 4.75 až 5.25 V DC
Ověření signálu
Spuštění Průzkumníka kodéru
Ujistěte se, že jste úspěšně dokončili následující úkoly:
- Mechanická montáž
- Elektrické připojení ke kodéru
- Instalace softwaru Encoder Explore
Spusťte nástroj Encoder Explorer (EE)
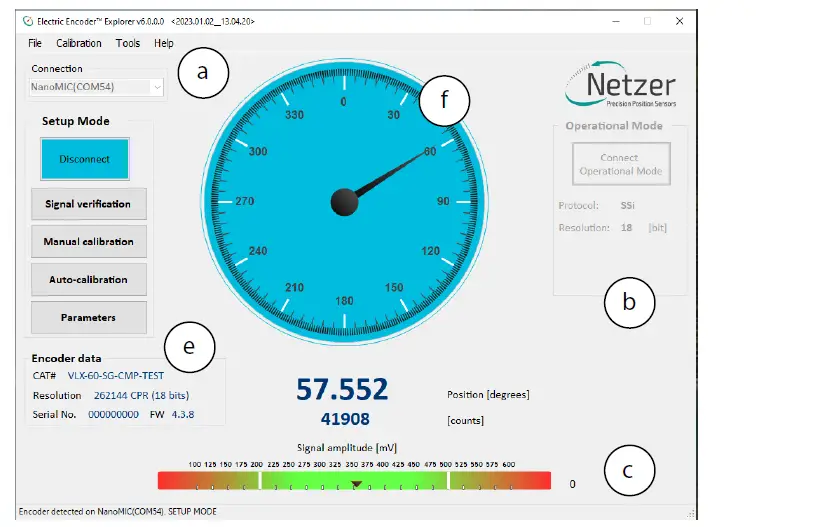
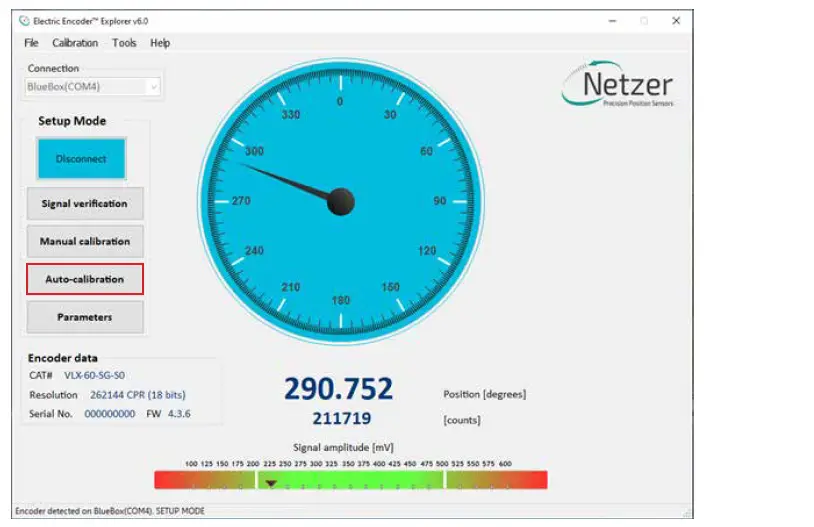
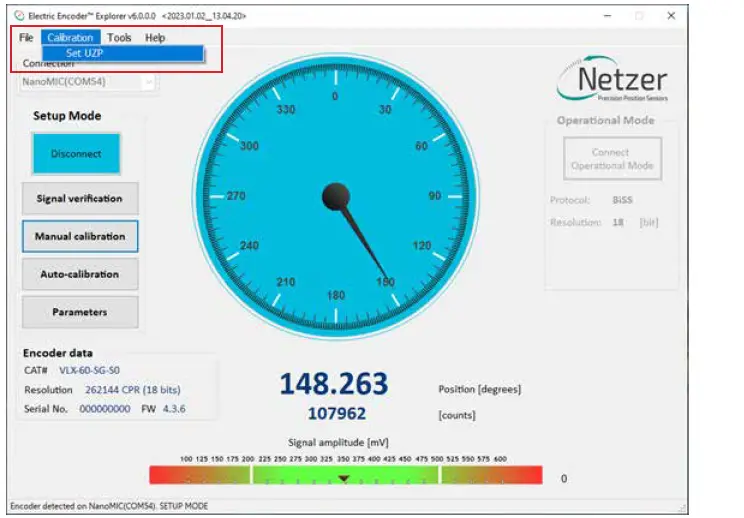
Zajistěte správnou komunikaci s kodérem: (výchozí režim nastavení). Polohový volič kodéru je v režimu nastavení zbarven modře, a to buď prostřednictvím NanoMic nebo BlueBoxu (a). Pamatujte, že provozní režim není dostupný prostřednictvím BlueBoxu (b). Signál amplitude bar ukazuje, zda je signál v přijatelné toleranci (c) . Všimněte si, že před provedením procesu ověření signálu může pruh indikovat signál mimo toleranci (d). Data kodéru se zobrazí v oblasti dat kodéru (CAT No., Serial No.) (e). Displej polohového voliče reaguje na otáčení hřídele (f).

Pro zajištění optimálního výkonu je důležité provést proces ověření signálu před kalibrací kodéru.
Proces ověření signálu
Proces ověření signálu zajišťuje, že je kodér správně namontován a poskytuje dobrý signál ampšířky. To se provádí sběrem nezpracovaných dat jemných a hrubých kanálů během rotace.
- Vybrat na hlavní obrazovce (a).
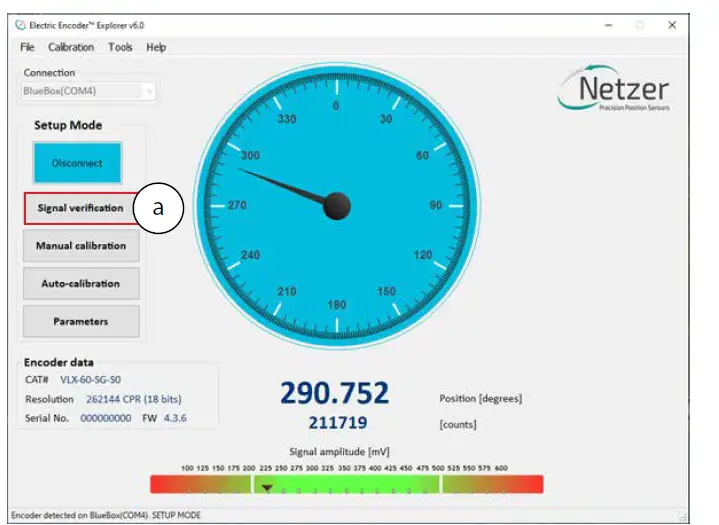
- Vybrat k zahájení procesu (b).
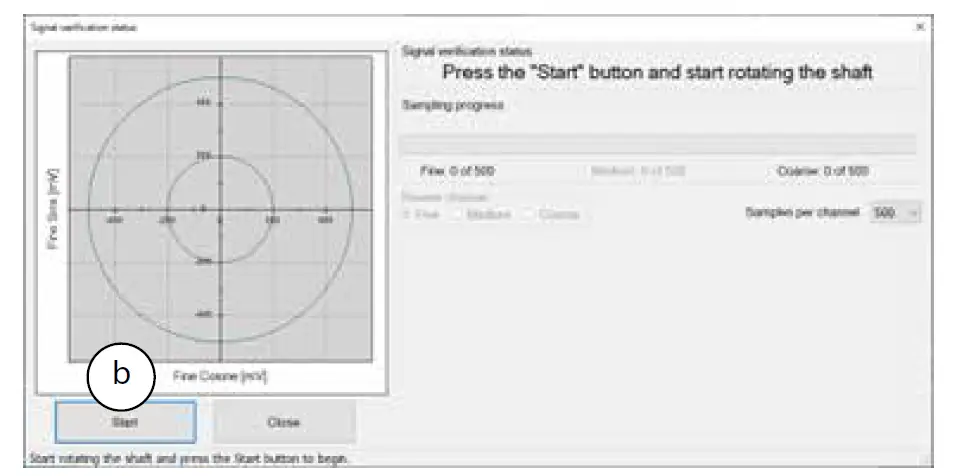
- Otáčejte hřídelí, abyste shromáždili data jemných a hrubých kanálů (c).

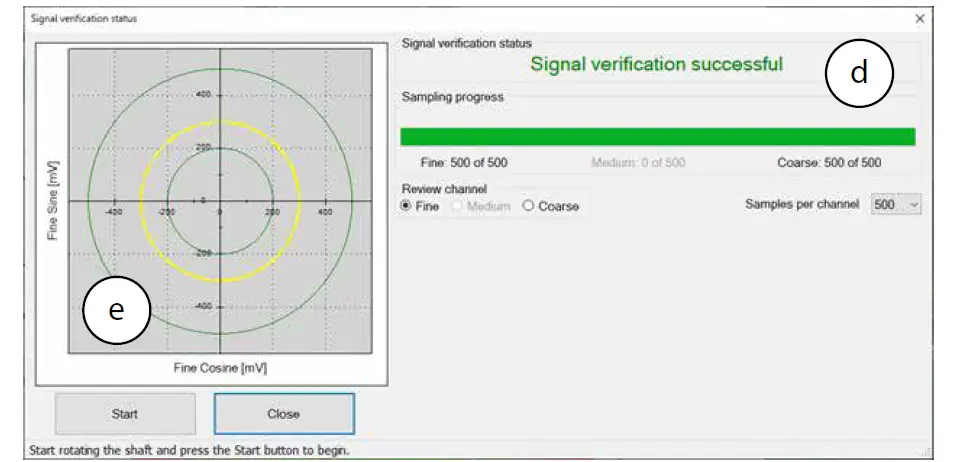
Pokud je proces úspěšný, objeví se stav „Ověření signálu úspěšné“ (d). 'ampkružnice nadmořské výšky“ by byla uprostřed mezi dvěma zelenými kruhy, nejlépe uprostřed tolerance (e).
Pamatujte však, že montáž kodéru směrem k extrémním mechanickým tolerancím může způsobit ampkružnice nadmořské výšky, která má být posunuta od přesné poloviny jmenovité polohy. Pokud je signál mimo toleranci, zobrazí se upozornění na chybu “Amplitude je nižší/vyšší než minimální/maximální limit XXX” (g). Navíc stav „Ověření signálu se nezdařilo – provést kalibraci amplitude“ se objeví nahoře (h).
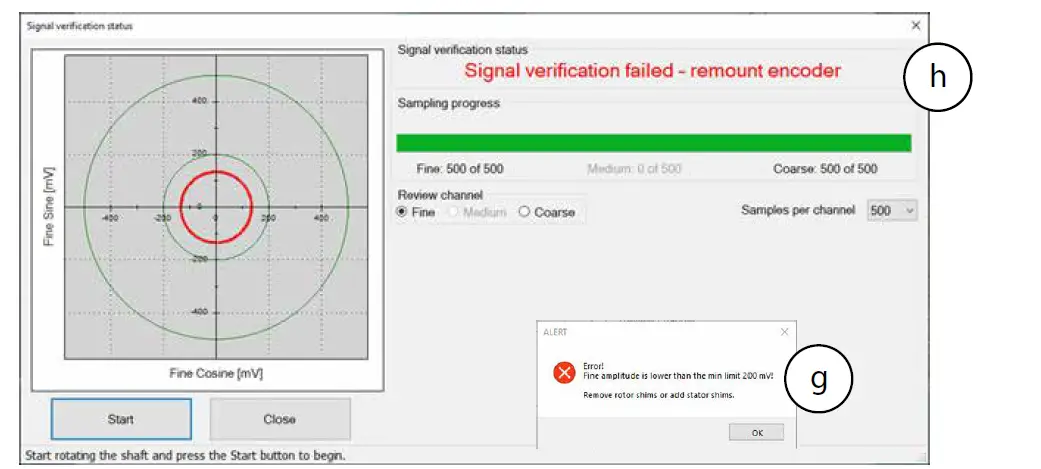
- Zastavte proces a znovu namontujte kodér, přičemž se ujistěte, že nejsou překročeny tolerance mechanické instalace, podle potřeby odstraňte nebo přidejte podložky.
- Po opětovném připojení zopakujte proces ověření signálu.
Jakmile je proces ověření signálu úspěšně dokončen, přejděte do fáze kalibrace kodéru, část 13
Kalibrace
Je důležité, aby při každé instalaci kodéru byl dokončen proces ověření signálu před pokusem o kalibraci kodéru. U kodérů s FW 4 verze 4.1.3 nebo vyšší je možné zvolit buď plně automatizovaný proces kalibrace, nebo manuální proces kalibrace fáze po fázi.
Automatická kalibrace
Automatická kalibrace je podporována kodéry s FW 4 verze 4.1.3 nebo vyšší. U těchto snímačů se zobrazí další tlačítko „Automatická kalibrace“.
Proces autokalibrace
Proces autokalibrace se skládá ze tří sekundtages:
- Jitter test – vyhodnocuje elektrický šum pro kanály kodéru Fine, Medium a Coarse. Během testu jitteru musí být hřídel v klidu.
Pozornost! Kritéria Vyhověl/nevyhověl testu Jitter jsou podle velmi přísných továrních kritérií a pokud selže, proces automatické kalibrace se přeruší.
Manuální test jitteru jako součást procesu ruční kalibrace v části 13.4 by však uživateli umožnil rozhodnout, zda je jitter přijatelný pro jeho potřeby. - Kalibrace ofsetu – provede kalibraci ofsetu, hřídel se musí neustále otáčet.
- Absolute Position (AP) kalibrace – provádí Coarse Ampzarovnání nadmořské výšky (CAA) a střední AmpLitude Alignment (MAA) jsou vypočteny.
Během procesu automatické kalibrace zůstává nulová poloha kodéru u nových kodérů ve výchozí tovární nulové poloze. Nulový bod je možné nastavit pomocí horní lišty menu výběrem záložky „Kalibrace“ a kliknutím na „Nastavit UZP“, jak je definováno v části 13.3.
Provádění automatické kalibrace
zmáčkni knoflík.
Otevře se hlavní okno automatické kalibrace.
- Vyberte vhodný rozsah měření pro vaši aplikaci (a).
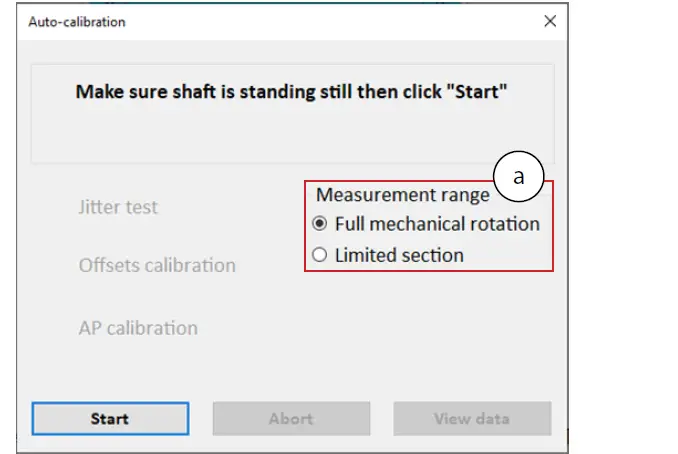
- Ujistěte se, že držíte hřídel v klidu a stiskněte
Bude proveden test hluku a po jeho úspěšném dokončení bude štítek „Test hluku“ označen zeleným zaškrtnutím. Po dokončení testu šumu se automaticky spustí kalibrace offsetu. Tato kalibrace vyžaduje, aby se hřídel neustále otáčela. Kalibrace AP se automaticky spustí po dokončení kalibrace přesnosti. Pokračujte v otáčení hřídele v této fázi, dokud nebude dokončena kalibrace AP a nebude resetován kodér. Po dokončení resetu je proces automatické kalibrace úspěšně dokončen.
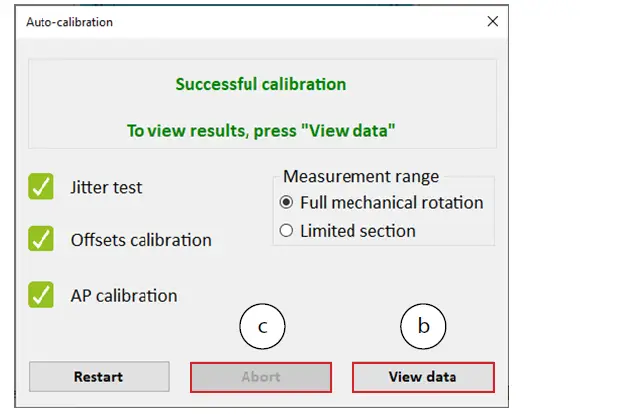
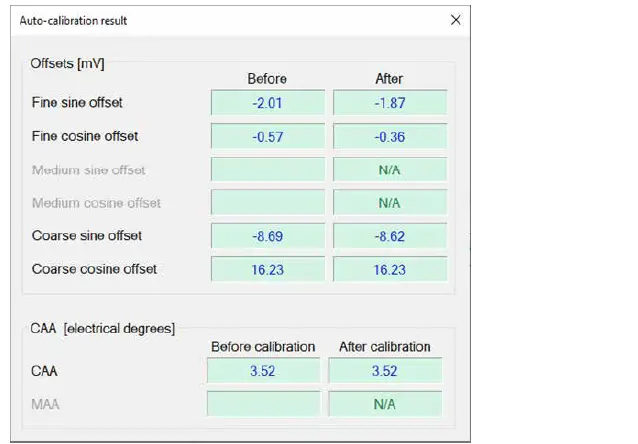
Uživatel může znovuview výsledky kalibrace kliknutím naView data> tlačítko (b).
Vždy je možné přerušit proces automatické kalibrace kliknutím na tlačítko (c).
Selhání automatické kalibrace
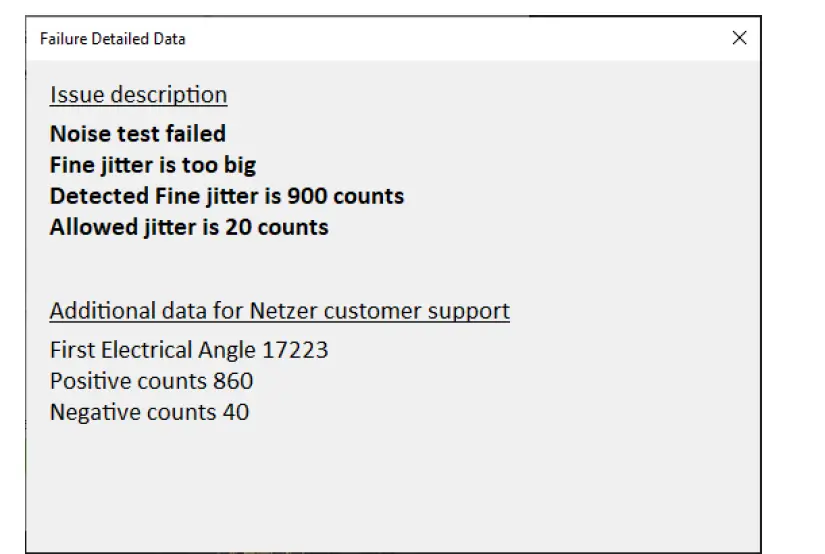
Pokud test selže (napřample the Noise test) – výsledek bude označen červeným X.
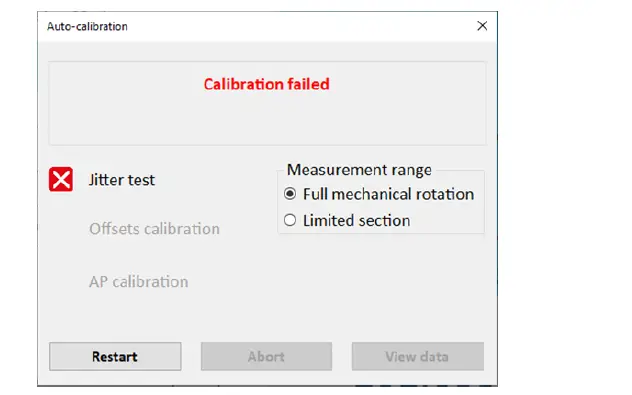
Pokud proces kalibrace selhal, zobrazí se opravná doporučení odpovídající prvku, který v testu selhal.
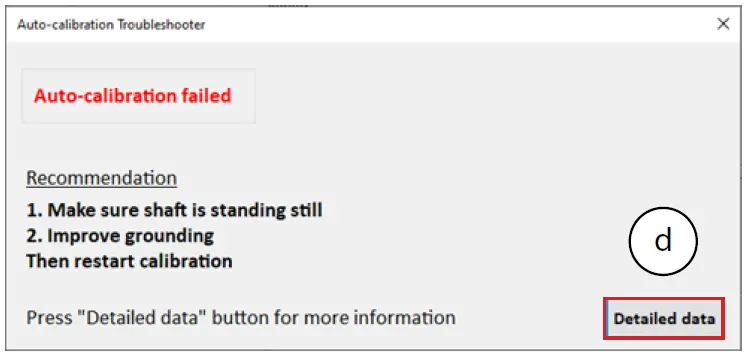
Je možné review podrobné informace o poruše kliknutím na tlačítko (d).
Nastavení nulové polohy kodéru
- Vyberte jednu z možností nastavení nulového bodu a klikněte .
Je možné nastavit buď aktuální polohu nebo otočit hřídel do jakékoli jiné polohy, která má být nastavena jako nulový bod.

Nulový bod je také možné nastavit pomocí horní lišty menu, výběrem záložky „Kalibrace“ a kliknutím na „Nastavit UZP“.
Jitter test
Jitter test slouží k vyhodnocení úrovně elektrického šumu. Běžné chvění by mělo být až +/- 3 počty; vyšší jitter může znamenat šum systému a vyžadoval by lepší uzemnění nebo stínění zdroje elektrického šumu.
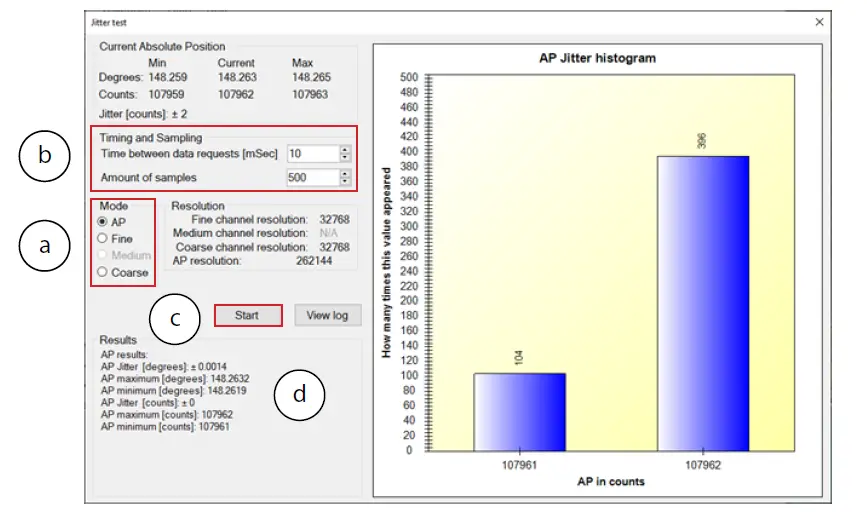
- Vyberte kartu „Kalibrace“ a klikněte na „Test jitteru“

- Vyberte testovací režim Jitter (a).
- Nastavte časování a Sampling parametry (b).
- Klikněte tlačítko (c) a zkontrolujte, zda jsou výsledky (d) v přijatelných tolerancích pro zamýšlené použití.
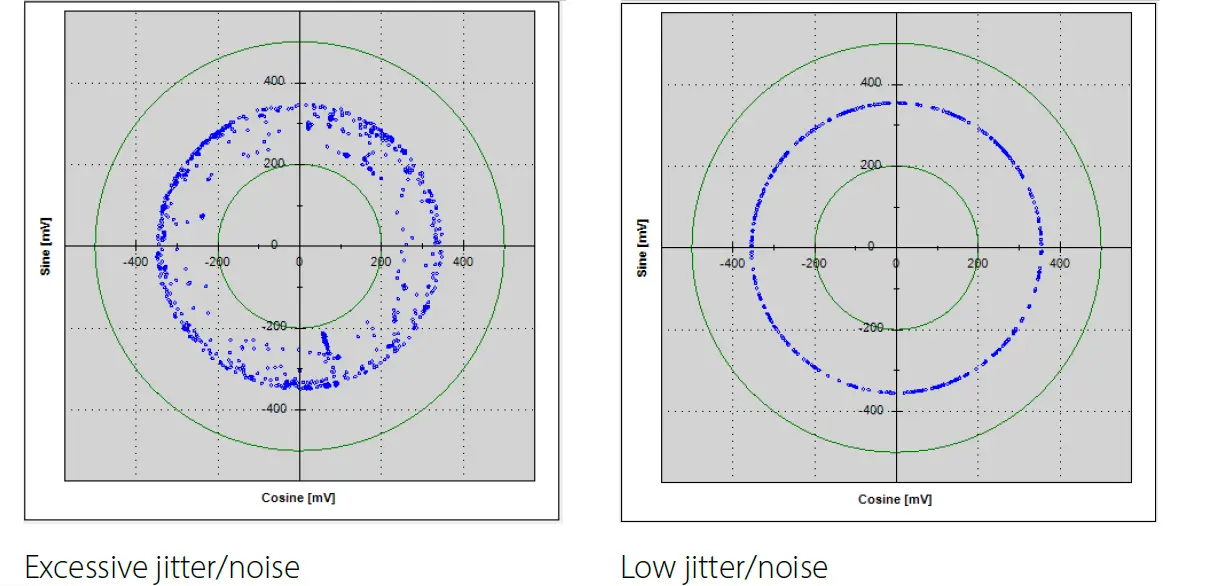
Další indikace nadměrného chvění/šumu, když jsou modré tečky v signálu ampkružnice nadmořské výšky nejsou rovnoměrně rozmístěny na tenké kružnici, jak je vidět níže.
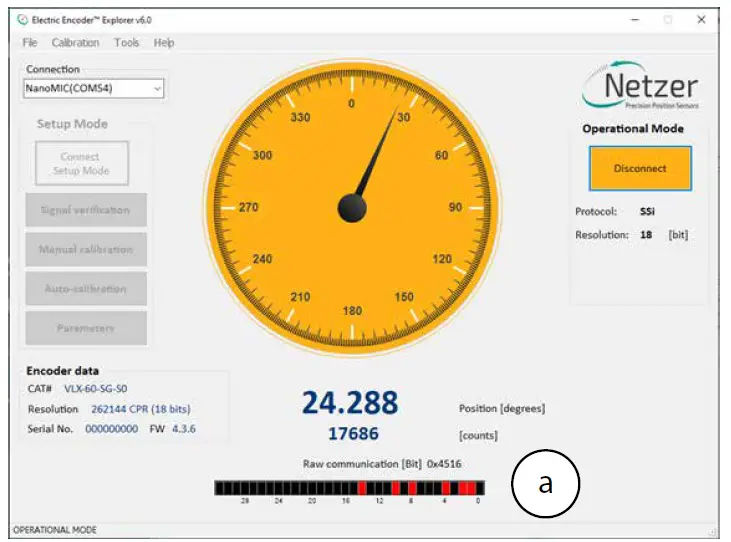
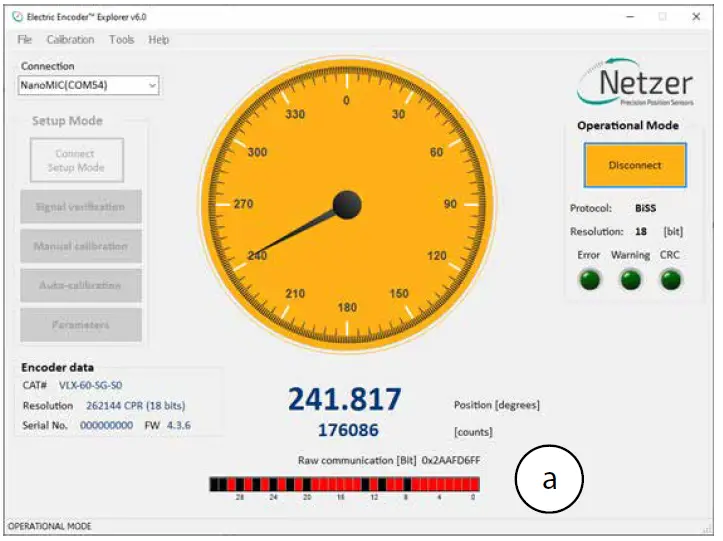
Provozní režim
SSi / BiSS
Indikace provozního režimu rozhraní kodéru SSi / BiSS je k dispozici pomocí NanoMIC pro připojení ke kodéru. V provozním režimu je barva otočného voliče oranžová.
Pro více informací si přečtěte o NanoMIC na Netzer webmísto
Provozní režim využívá rozhraní SSi / BiSS s taktovací frekvencí 1 MHz. Ovladač polohy kodéru je v provozním režimu zbarven oranžově. Pruh pod číselníkem je odpovídající výstup binárního slova pro aktuální polohu hřídele (a).
Protokol SSi
Protokol BiSS
Ústředí společnosti
IZRAEL
Netzer Precision Position Sensors ACS Ltd.
Průmyslový park Misgav, PO Box 1359
DN Misgav, 2017400
- Tel: +972 4 999 0420
USA
Netzer Precision Position Sensors Inc.
200 Main Street, Salem
NH 03079
- Tel: +1 617 901 0820
- www.netzerprecision.com
Copyright © 2024 Netzer Precision Position Sensors ACS Ltd. Všechna práva vyhrazena.
Dokumenty / zdroje
 |
Sada rotačního enkodéru Netzer Precision VLP-247 Kodér s dutým hřídelem [pdfUživatelská příručka VLP-247, VLP-247, VLP-247 Sada rotačního enkodéru s dutým hřídelem Kodér, VLP-247, Sada rotačního enkodéru s dutou hřídelí Kodér, Sada rotačního enkodéru s hřídelí, Kodér soupravy rotačního enkodéru, Kodér soupravy kodéru, Kodér soupravy, Kodér |



