BUNKER pro
Tým Agile X Robotics
Uživatelská příručka V.1.0.0 2021.10

Pásový mobilní robot Bunker Pro
Tato kapitola obsahuje důležité bezpečnostní informace. Před prvním zapnutím robota si musí každá osoba nebo organizace tyto informace přečíst a porozumět jim, než zařízení použije. Máte-li jakékoli dotazy k použití, kontaktujte nás na podpora@agilex.ai. Dodržujte a dodržujte všechny montážní pokyny a pokyny v kapitolách tohoto návodu, což je velmi důležité. Zvláštní pozornost by měla být věnována textu souvisejícímu s výstražnými značkami.
![]() Důležité bezpečnostní informace
Důležité bezpečnostní informace
Informace v této příručce nezahrnují návrh, instalaci a provoz kompletní robotické aplikace, ani všechny periferie, které mohou ovlivnit bezpečnost tohoto kompletního systému. Konstrukce a použití celého systému musí splňovat bezpečnostní požadavky stanovené v normách a předpisech země, kde je robot instalován. Integrátoři a koncoví zákazníci společnosti BUNKERPRO mají odpovědnost za zajištění souladu s příslušnými ustanoveními a praktickými zákony a předpisy a za to, že při úplné aplikaci robota nevzniknou žádná velká nebezpečí. To zahrnuje, ale není omezeno na následující:
1. Efektivita a odpovědnost
- Proveďte posouzení rizik celého robotického systému.
- Propojte přídavná bezpečnostní zařízení ostatních strojních zařízení definovaná posouzením rizik.
- Potvrďte, že návrh a instalace periferií celého robotického systému, včetně softwarových a hardwarových systémů, jsou správné.
- Tento robot nemá příslušné bezpečnostní funkce kompletního autonomního mobilního robota, včetně, ale bez omezení, automatické ochrany proti srážce, proti pádu, varování před přiblížením tvora atd. Příslušné funkce vyžadují, aby integrátoři a koncoví zákazníci provedli hodnocení bezpečnosti v souladu s příslušná ustanovení a platné zákony a předpisy, aby bylo zajištěno, že vyvinutý robot nebude při praktickém použití vystaven žádným velkým nebezpečím a skrytým nebezpečím.
- Shromážděte všechny dokumenty v technickém file: včetně posouzení rizik a této příručky.
- Před provozováním a používáním zařízení se seznamte s možnými bezpečnostními riziky.
2. Životní prostředí
- Při prvním použití si prosím pečlivě přečtěte tento návod, abyste pochopili základní provozní obsah a provozní specifikace.
- Pro dálkové ovládání volte relativně otevřenou plochu, protože samotné vozidlo nemá žádné automatické senzory vyhýbání se překážkám.
- Používejte při okolní teplotě -20-60 °C.
- Pokud vozidlo individuálně nepřizpůsobuje úroveň ochrany IP, jeho vodotěsnost a prachotěsnost je IP66.
3. Zkontrolujte
- Ujistěte se, že každé zařízení je dostatečně nabité.
- Ujistěte se, že vozidlo nemá žádné zjevné abnormality.
- Zkontrolujte, zda je baterie dálkového ovladače dostatečně nabitá.
- Při používání se ujistěte, že byl nouzový vypínač uvolněn.
4. Provoz
- Zajistěte, aby bylo okolí během provozu relativně otevřené.
- Dálkové ovládání v zorném poli.
- Maximální zatížení BUNKERPRO je 120 kg. Při používání se ujistěte, že užitečné zatížení nepřesahuje 120 kg.
- Při instalaci externího nástavce pro BUNKERPRO potvrďte těžiště nástavce a ujistěte se, že je ve středu otáčení.
- Když je zařízení voltage je nižší než 48V, nabijte jej prosím včas.
- Pokud je zařízení abnormální, okamžitě jej přestaňte používat, abyste předešli sekundárnímu poškození.
- Pokud je zařízení abnormální, obraťte se na příslušný technický personál a bez povolení s ním nemanipulujte.
- Používejte jej v prostředí, které splňuje požadavky na stupeň ochrany podle stupně ochrany IP zařízení.
- Netlačte vozidlo přímo.
- Při nabíjení se ujistěte, že okolní teplota je vyšší než 0°C.
5. Údržba
- Pravidelně kontrolujte napnutí zavěšené dráhy a utáhněte dráhu každých 150~200H.
- Po každých 500 hodinách provozu zkontrolujte šrouby a matice každé části karoserie. Pokud jsou uvolněné, okamžitě je utáhnu.
- Aby byla zajištěna akumulační kapacita baterie, měla by být baterie skladována nabitá a baterie by se měla pravidelně nabíjet, pokud není delší dobu používána.
Úvod do BUNKERPRO
BUNKERPRO je pásové podvozkové vozidlo pro všestranné průmyslové aplikace. Vyznačuje se jednoduchým a citlivým ovládáním, velkým vývojovým prostorem, vhodným pro vývoj a aplikaci v různých oborech, nezávislým závěsným systémem, odolným tlumením nárazů, silnou lezeckou schopností a schopností vylézt po schodech. Může být použit pro vývoj speciálních robotů, jako jsou roboty pro kontrolu a průzkum, záchranu a EOD, speciální střelbu, speciální přepravu atd., k řešení řešení pohybu robotů.
Seznam produktů
| Jméno | Množství |
| Tělo robota BUNKER PRO | X1 |
| Nabíječka baterií (AC220V) | X1 |
| Letecká zástrčka (4kolíková) | X1 |
| FS vysílač dálkového ovládání (volitelné) | X1 |
| Komunikační modul USB na CAN | X1 |
Technické specifikace
| Typy parametrů | Položky | Hodnoty |
| Rozměry | Rozměry | 1064 mm * 845 mm * 73 mm |
| Výška podvozku | 120 mm | |
| Šířka stopy | 150 mm | |
| Délka | 740 mm | |
| Hmotnost | Hmotnost | Asi 180 kg |
| Zatížení | 120 kg | |
| Baterie | Typ | Lithiová baterie |
| Kapacita | 60 AH | |
| svtage | 48V | |
| Pohyb | Maximální lezecká kapacita | 30° |
| Maximální rychlost | 1.5 m/s | |
| Minimální poloměr otáčení | Lze otáčet na místě | |
| Maximální překážka | 180 mm | |
| Parametry motoru | Střídavé servo 2×1500W motor | |
| Parametry kódového disku | 2500 řádky | |
| Provozní teplota | -20~60° | |
| Redukční poměr | 1:7.5 | |
| Řízení | Režim ovládání | Dálkové ovládání |
| RC vysílač | 2.4G/extrémní vzdálenost 200M | |
| Komunikační rozhraní | CAN |
Požadavek na vývoj
BUNKERPRO je z výroby vybaven dálkovým ovládáním FS a uživatelé mohou ovládat podvozek mobilního robota BUNKERPRO pomocí dálkového ovládání, aby dokončili operace pohybu a otáčení; BUNKERPRO je vybaveno rozhraním CAN a uživatelé přes něj mohou provádět sekundární vývoj.
Základy
Tato část poskytne základní úvod do podvozku mobilního robota BUNKERPRO, aby uživatelé a vývojáři měli základní znalosti o podvozku BUNKERPRO.
1Pokyny k elektrickým rozhraním
Zadní elektrická rozhraní jsou znázorněna na obrázku 2.1, kde Q1 je rozhraní CAN a 48V pro elektrické letecké rozhraní, Q2 je vypínač napájení, Q3 je nabíjecí rozhraní, Q4 je anténa, Q5 a Q6 jsou rozhraní pro ladění řidiče a hlavní ovládací rozhraní ladění (neotevřené navenek) a Q7 je interakce zobrazení napájení.

Definice komunikačního a napájecího rozhraní Q1 je znázorněna na obrázku 2-2.

| Pin č. | Typ kolíku | Funkce a Definice | Poznámky |
| 1 | Moc | VCC | Power positive, svtage rozsah 23 – 29.2V, Max. proud 10A |
| 2 | Moc | GND | Moc negativní |
| 3 | CAN | CAN_H | Sběrnice CAN vysoká |
| 4 | CAN | MŮŽU | CAN sběrnice nízká |
Obrázek 2.2 Definice kolíků rozhraní pro rozšíření zadního letectví
Návod na dálkové ovládání
Dálkové ovládání FS je volitelné příslušenství pro BUNKERPRO. Zákazníci si mohou vybrat podle skutečných potřeb. Dálkovým ovladačem lze snadno ovládat univerzální podvozek robota BUNKERPRO. V tomto produktu používáme provedení levého plynu. Jeho definici a funkci naleznete na obrázku 2.3. Funkce tlačítek jsou definovány jako: SWA, SWC a SWD jsou dočasně zakázány; SWB je tlačítko pro výběr režimu ovládání, vytočené nahoru je režim ovládání příkazů, vytočené uprostřed je režim dálkového ovládání; S1 je tlačítko plynu, které ovládá BUNKERPRO vpřed a vzad; S2 ovládá rotaci, zatímco POWER je vypínač a můžete zapnout dálkový ovladač jejich současným stisknutím. Je třeba poznamenat, že SWA, SWB, SWC a SWD musí být při zapnutí dálkového ovládání nahoře.

Obrázek 2.3 Schematické schéma tlačítek dálkového ovládání FS
Instrukce o nárocích na ovládání a pohybech
Nastavili jsme referenční souřadnicový systém pro pozemní mobilní vozidlo podle normy ISO 8855, jak je znázorněno na obrázku 2.4.

Jak je znázorněno na obrázku 2.4, karoserie BUNKERPRO je rovnoběžná s osou X stanoveného referenčního souřadnicového systému.
V režimu dálkového ovládání stiskněte joystick dálkového ovládání S1 dopředu pro pohyb v kladném směru osy X a zatlačením S1 dozadu se pohybujte v záporném směru osy X. Když je S1 posunuto na maximální hodnotu, je rychlost pohybu v kladném směru osy X maximální, a když je posunuto na minimální hodnotu, je rychlost pohybu v záporném směru osy X maximální; joystick dálkového ovládání S2 ovládá otáčení karoserie vozidla doleva a doprava. Když je S2 zatlačeno doleva, karoserie vozidla se otáčí z kladného směru osy X do kladného směru osy Y, a když je S2 zatlačena doprava, karoserie vozidla se otáčí z kladného směru osy Y.
směr osy X k zápornému směru osy Y. Když je S2 posunuto doleva na maximální hodnotu, lineární rychlost otáčení proti směru hodinových ručiček je maximální, a když je S2 zatlačena doprava na maximální hodnotu, lineární rychlost otáčení ve směru hodinových ručiček je maximální. V režimu řídicího příkazu kladná hodnota lineární rychlosti znamená pohyb v kladném směru osy X a záporná hodnota lineární rychlosti znamená pohyb v záporném směru osy X; kladná hodnota úhlové rychlosti znamená, že se karoserie vozidla pohybuje z kladného směru osy X do kladného směru osy Y a záporná hodnota úhlové rychlosti znamená, že se karoserie vozidla pohybuje z kladného směru osy Y. osa X k zápornému směru osy Y.
Použití a vývoj
Tato část představuje především základní provoz a použití platformy BUNKERPRO a jak provést sekundární vývoj karoserie vozidla prostřednictvím externího rozhraní CAN a protokolu CAN bus.
Použití a provoz
Kontrola
- Zkontrolujte stav karoserie vozidla. Zkontrolujte, zda karoserie vozidla nevykazuje zjevné abnormality; pokud ano, kontaktujte prosím poprodejní podporu;
- Při prvním použití zkontrolujte, zda je stisknuto Q2 (vypínač) na zadním elektrickém panelu; pokud není stisknuto, stiskněte jej a uvolněte, pak je v uvolněném stavu.
Spuštění
- Stiskněte vypínač (Q2 na elektrickém panelu); za normálních okolností se rozsvítí kontrolka vypínače a voltmetr zobrazí objem baterietage normálně;
- Zkontrolujte objem baterietagE. Pokud zvtage je větší než 48V, to znamená voltage je normální. Pokud zvtage je nižší než 48V, prosím nabijte; když zvtage je nižší než 46V, BUNKERPRO se nemůže normálně pohybovat.
Vypnutí
- Stisknutím hlavního vypínače vypněte napájení;
Základní provozní postupy dálkového ovládání:
- Po normálním spuštění podvozku robota BUNKERPRO spusťte dálkové ovládání a vyberte režim dálkového ovládání pro ovládání pohybu platformy BUNKER PRO pomocí dálkového ovládání.
Nabíjení
BUNKERPRO je standardně vybaveno standardní nabíječkou, která dokáže vyhovět nabíjecím potřebám zákazníků. Konkrétní provozní postupy nabíjení jsou následující:
- Ujistěte se, že šasi BUNKERPRO je ve vypnutém stavu. Před nabíjením se prosím ujistěte, že Q2 (síťový vypínač) v zadní elektrické konzole je vypnutý; zasuňte zástrčku nabíječky do
- Nabíjecí rozhraní Q3 na zadním elektrickém ovládacím panelu;
- Připojte nabíječku ke zdroji napájení a zapněte vypínač nabíječky, abyste vstoupili do stavu nabíjení.
- Při výchozím nabíjení není na šasi žádná kontrolka. Zda se nabíjí nebo ne, závisí na indikátoru stavu nabíječky.
Rozvoj
BUNKERPRO poskytuje rozhraní CAN pro vývoj uživatele a uživatel může prostřednictvím tohoto rozhraní ovládat karoserii vozidla.
Komunikační standard CAN v BUNKERPRO přijímá standard CAN2.0B; komunikační přenosová rychlost je 500 kB a formát zprávy přijímá formát MOTOROLA. Lineární rychlost pohybu a úhlová rychlost otáčení podvozku lze ovládat prostřednictvím externího rozhraní sběrnice CAN; BUNKERPRO bude v reálném čase odebírat aktuální informace o stavu pohybu a informace o stavu podvozku BUNKERPRO.
Protokol obsahuje rámec zpětné vazby stavu systému, rámec zpětné vazby řízení pohybu a rámec řízení.
Obsah protokolu je následující:
Příkaz zpětné vazby stavu systému zahrnuje zpětnou vazbu aktuálního stavu karoserie vozidla, zpětnou vazbu stavu řídicího režimu, objem baterietagzpětná vazba a zpětná vazba na poruchu. Obsah protokolu je uveden v tabulce 3.1.
Tabulka 3.1 Rámec zpětné vazby stavu systému podvozku BUNKERPRO
| Název příkazu | Příkaz zpětné vazby stavu systému | |||
| Odesílající uzel | Přijímací uzel | ID | Cyklus i ms) | Časový limit příjmu (ms) |
| Podvozek Steer-by-wire | Rozhodování řídicí jednotka | 0x221 | 200 ms | Žádný |
| Délka dat | 0x08 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte [0] | Aktuální stav karoserie vozidla | nepodepsaný int8 | 0x00 Systém v normálním stavu Ox01 Režim nouzového zastavení 0x02 Systémová výjimka | |
| byte f 1] | Ovládání režimu | nepodepsaný int8 | Pohotovostní režim Ox00 Režim řízení příkazů Ox01 CAN 0x03 Režim dálkového ovládání | |
| byte [2] byte [3] | Baterie objtage je 8 bitů vyšší v bafteryoltage je o osm bitů nižší | nepodepsaný int16 | Skutečný svtagex 10 (s přesností 0.1V) | |
| být [4] byte [5] | Rezervováno Selhání informace | nepodepsaný int8 | 0x0 Viz [Popis informací o poruše) | |
| byte [6] | Rezervováno | – | Ox00 | |
| byte [7] | Kontrola počtu (počet) | nepodepsaný int8 | Počet cyklů 0-255: pokaždé, když je odeslána instrukce, počet se jednou zvýší |
Tabulka 3.2 Popis informací o poruše
| Popis informací o poruše | ||
| Byte | Bit | Význam |
| bit [0] | Podvolba baterietage chyba | |
| bit [1] | Podvolba baterietage varování | |
| bit [2] | Ochrana proti odpojení dálkového ovládání (0: normální, 1: odpojení dálkového ovládání) | |
| bit [3] | Chyba komunikace motoru č. 1 (0: Ne selhání 1: selhání) | |
| bit [4] | Chyba komunikace motoru č. 2 (0: Ne selhání 1: selhání) | |
| bit [5] | Rezervováno, výchozí 0 | |
| bit [6] | Rezervováno, výchozí 0 | |
| bit [7] | Rezervováno, výchozí 0 |
Příkaz zpětného rámce řízení pohybu zahrnuje zpětnou vazbu aktuální lineární rychlosti a úhlové rychlosti pohybující se karoserie vozidla. Konkrétní obsah protokolu je uveden v tabulce 3.3.
Tabulka 3.3 Rámec zpětné vazby pro řízení pohybu
| Název příkazu | Příkaz zpětné vazby řízení pohybu | |||
| Odesílání uzel | Přijímací uzel | ID | Cyklus (ms) | Časový limit příjmu (ms) |
| Steer-bywire podvozek | Rozhodování řídicí jednotka | 0x221 | 20 ms | Žádný |
| Data délka | 0x08 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte [0] byte [1] | Pohyb rychlost je o 8 bitů vyšší Ovement rychlost je o 8 bitů nižší | podepsáno int16 | Skutečná rychlost × 1000 (s přesností 0.001 m/s) | |
| byte [2] byte [3] | Rychlost otáčení je o 8 bitů vyšší Rychlost otáčení je o 8 bitů nižší | podepsáno int16 | Skutečná rychlost × 1000 (s přesností 0.001 rad/s) | |
| byte [4] | Rezervováno | – | 0x00 | |
| byte [5] | Rezervováno | – | 0x00 | |
| byte [6] | Rezervováno | – | 0x00 | |
| byte [7] | Rezervováno | – | 0x00 |
Řídicí rám obsahuje lineární otevření řízení rychlosti, úhlové otevření řízení rychlosti a kontrolní součet. Konkrétní obsah protokolu je uveden v tabulce 3.4.
Tabulka 3.4 Rám pro řízení pohybu
| Název příkazu | Režim ovládání | |||
| Odesílající uzel | Přijímací uzel | ID | Cyklus ( rns ) | Časový limit příjmu (ms) |
| Rozhodování řídicí jednotka | Uzel podvozku | Ox111 | 20 ms | Žádný |
| Délka dat | 0x08 | |||
| Pozice | Funkce | Typ dat | ||
| byte [0] byte [1) | Lineární rychlost je o osm bitů vyšší. Lineární rychlost je o osm bitů nižší | podepsáno int16 | Rychlost pohybu karoserie vozidla. jednotka: mrins, rozsah [-1700,1700] | |
| byte [2] byte [3] | Úhlová rychlost je osm bitů vyšší Úhlový rychlost je osm bitů spodní | podepsáno int16 | Úhlová rychlost otáčení karoserie vozidla, jednotka: 0.001 radls. rozsah [- 3140,3140) | |
| byte [4] | Rezervováno | — | Ox00 | |
| byte [5] | Rezervováno | — | Ox00 | |
| byte [6] | Rezervováno | — | Ox00 | |
| byte [7] | Rezervováno | — | Ox00 |
Rámeček nastavení režimu se používá k nastavení ovládacího rozhraní terminálu. Konkrétní obsah protokolu je uveden v tabulce 3.5
Tabulka 3.5 Rámeček nastavení režimu ovládání
| Název příkazu | Příkaz nastavení režimu ovládání | |||
| Odesílající uzel | Přijímací uzel | ID | Cyklus ( ms ) | Časový limit příjmu (ms) |
| Rozhodování řídicí jednotka | Podvozek uzel | 0x421 | 20 ms | 500 ms |
| Délka dat | Ox01 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte (01 | CAN ovládání umožnit | nepodepsaný int8 | Ox00 Pohotovostní režim 0x01 příkaz CAN režim povolit |
Poznámka [1] Popis režimu ovládání
Když není dálkový ovladač BUNKERPRO zapnutý, je ve výchozím nastavení režim ovládání pohotovostní a musíte jej přepnout do příkazového režimu, abyste mohli odeslat příkaz k ovládání pohybu. Pokud je dálkový ovladač zapnutý, má nejvyšší oprávnění a může zastínit ovládání příkazů. Když je dálkový ovladač přepnut do příkazového režimu, musí ještě před reakcí na příkaz rychlosti odeslat příkaz k nastavení režimu řízení.
Rámeček nastavení stavu se používá k odstranění systémových chyb. Konkrétní obsah protokolu je uveden v tabulce 3.6.
Tabulka 3.6 Rámec nastavení stavu
| Název příkazu | Příkaz nastavení stavu | |||
| Odesílající uzel | Přijímací uzel | ID | Cyklus (ms) | Časový limit příjmu |
| Rozhodování řídicí jednotka | Uzel podvozku | 0x441 | Žádný | Žádný |
| Délka dat | 0x01 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte [0] | Chyba při odstraňování příkaz | nepodepsaný int8 | 0x00 vymaže všechny chyby 0x01 Vymažte chybu motoru 1 0x02 Vymažte chybu motoru 2 |
Poznámka 3: Sample data; následující údaje jsou pouze pro testovací účely
1. Vozidlo se pohybuje rychlostí 0.15/S
| byte [0] | byte [1] | byte [2] | byte [3] | byte [4] | byte [5] | byte [6] | byte [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
2. Vozidlo se otáčí rychlostí 0.2 RAD/S
| byte [0] | byte [1] | byte [2] | byte [3] | byte [4] | byte [5] | byte [6] | byte [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
Kromě informací o stavu podvozku budou zpětně vráceny informace o zpětné vazbě podvozku také údaje o motoru a údaje ze snímačů.
Tabulka 3.7 Otáčky motoru Aktuální informace o poloze Zpětná vazba
| Název příkazu | Motorový pohon Vysokorychlostní informační rám pro zpětnou vazbu | |||
| Odesílající uzel | Přijímací uzel | ID | Čas příjmu - ven (ms) | |
| Podvozek Steer-by-wire | Rozhodování řídicí jednotka | 0x251-0x254 | 20 ms | Žádný |
| Data délka | Ox08 | |||
| Pozice | Funkce | – | Popis | |
| byte [0] byte [1] | Otáčky motoru jsou o 8 bitů vyšší Otáčky motoru jsou o 8 bitů nižší | podepsáno int16 | Proud otáčky motoru Jednotka RPM | |
| byte [2] | Rezervováno | – | Ox00 | |
| byte [3] | Pohon teplota je 8 bitů spodní | – | Jednotka 1 t | |
| byte [4] | Rezervováno | – | Ox00 | |
| byte [5] | Stav pohonu | – | Podrobnosti viz Tabulka 3.9 | |
| byte [6] | Rezervováno | – | Ox00 | |
| byte [7] | Rezervováno | – | 0x00 |
Tabulka 3.8 Teplota motoru, svtagea Zpětná vazba stavových informací
| Název příkazu | Informační rámeček s informacemi o nízké rychlosti pohonu motoru | ||
| Uzel odesílání I Přijímací uzel | ID | Cyklus :ms) | Časový limit příjmu (ms) |
| Steer-by- Dedsion- kontrola výroby drátů | podvozková jednotka 0x261-0x264 | Žádný | Žádný |
| Délka dat 0x08 | |||
| Poloha I Funkce | Popis | ||
| byte [0] byte [1] | Rezervováno Rezervováno | Ox00 0x00 | |
| byte [2] byte [3] | Teplota pohonu je 8 bitů vyšší Teplota měniče je o 8 bitů nižší | podepsáno int16 | Jednotka 1℃ |
| byte [4] | Rezervováno | Ox00 | |
| byte [5] | Stav pohonu | nepodepsaný int8 | Viz tabulka 3.9 pro podrobnosti |
| byte [6] | Rezervováno | – | Ox00 |
| byte [7] | Rezervováno | – | 0x00 |
Tabulka 3.9 Stav disku
| Byte | Bit | Popis |
| byte [5] | bit [0] | Zda napájecí zdroj voltage je příliš nízké (0:Normální 1:Příliš nízké) |
| bit [1] | Zda je motor přehřátý (0: Normální 1: Přehřátý) | |
| bit [2] | Rezervováno | |
| bit [3] | Rezervováno | |
| bit [4] | Rezervováno | |
| bit [5] | Rezervováno | |
| bit [6] | Rezervováno | |
| bit [7] | Rezervováno |
Tabulka 3.10 Rámec zpětné vazby počítadla kilometrů
| Název příkazu | Rámeček zpětné vazby informací o počítadle kilometrů | |||
| Odesílání uzel | Přijímací uzel | ID | Cyklus ( ms ) | Časový limit příjmu (ms) |
| Steer-by- podvozek | Rozhodování řídicí jednotka | 0x311 | 20 ms | Žádný |
| Délka dat | Ox08 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte [0] byte [1] byte [2] byte [3] | Nejvyšší bit počítadla kilometrů levého kola Druhý nejvyšší bit počítadla kilometrů levého kola Druhý nejnižší bit počítadla kilometrů levého kola Nejnižší bit počítadla kilometrů levého kola | podepsáno int32 | Zpětná vazba počítadla kilometrů levého podvozku Jednotka: mm | |
| byte [4] byte [5] byte [6] bajt 17) | Nejvyšší kousek zprava kolo počítadlo kilometrů Druhý nejvyšší bit počítadla kilometrů pravého kola Druhý nejnižší bit počítadla kilometrů pravého kola Nejnižší kousek zprava kolo počítadlo kilometrů | podepsáno int32 Jednotka: mm | Počítadlo kilometrů pravého kola podvozku zpětná vazba |
Tabulka 3.11 Zpětná vazba informací o dálkovém ovládání
| Název příkazu | Informace o dálkovém ovládání | |||
| Odesílající uzel | Přijímací uzel | ID | Cyklus ( ms / | Časový limit příjmu (ms) |
| Steer-bywire podvozek | Rozhodování řídicí jednotka | 0x241 | 20 ms | Žádný |
| Data délka | 0x08 | |||
| Pozice | Funkce | Typ dat | Popis | |
| byte [0] | SW na dálkové ovládání zpětná vazba | nepodepsaný int8 | bit[0-1]: SWA 2-Up 3-Down bit[2-3]: SWB: 2-Up 1-Střední 3-Dolů bit14-51: SWC: 2-Up 1-Střední 3-Dolů bit[6-71: SWD: 2-Up 3-Down | |
| hY1e [1] | Pravá páka levá a | podepsáno int8 | Rozsah: (-100.100 XNUMX) | |
| byte [2] | Pravá páka vlevo a vpravo | podepsáno int8 | Rozsah: [-100.100 XNUMX] | |
| byte [3] | Levá páka nahoru a dolů | podepsáno int8 | Rozsah: (-100.100 XNUMX] | |
| byte [4] | Levá páka vlevo a vpravo | podepsáno int8 | Rozsah: (-100.100 XNUMX] | |
| byte ISI | Levý knoflík VRA | podepsáno int8 | Rozsah: (-100.100 XNUMX) | |
| byte [6] | Rezervováno | — | 0x00 | |
| byte (71 | Kontrola počtu | nepodepsaný int8 | počet cyklů 0-255 |
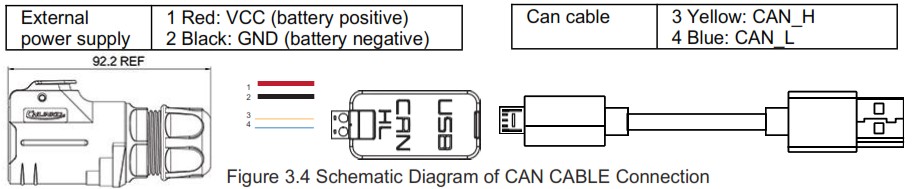
Připojení kabelu CAN
BUNKERPRO se dodává s leteckým zástrčkovým konektorem, jak je znázorněno na obrázku 3.2. Definice kabelu: žlutá je CANH, modrá je CANL, červená je kladné napájení a černá je záporné napájení.
Poznámka: V aktuální verzi BUNKERPRO je rozhraní externího rozšíření otevřené pouze pro zadní rozhraní. V této verzi může zdroj poskytnout maximální proud 10A.

Realizace řízení příkazů CAN
Normálně spusťte podvozek mobilního robota BUNKERPRO, zapněte dálkové ovládání FS a poté přepněte režim ovládání na příkazové ovládání, to znamená otočte volbu režimu SWB na dálkovém ovládání FS nahoru. V tomto okamžiku bude šasi BUNKERPRO přijímat příkazy z rozhraní CAN a hostitel může současně analyzovat aktuální stav šasi prostřednictvím dat v reálném čase zpětně poskytovaných sběrnicí CAN. Konkrétní obsah protokolu naleznete v komunikačním protokolu CAN.
Upgrade firmwaru (zatím neotevřený)
S cílem usnadnit uživatelům upgrade verze firmwaru používaného BUNKERPRO a přinést zákazníkům úplnější zážitek, je BUNKERPRO vybaveno hardwarovým rozhraním pro upgrade firmwaru a odpovídajícím klientským softwarem. Klientské rozhraní je znázorněno na obrázku 3.3.
Příprava na upgrade
- Sériový kabel X 1
- USB na sériový port X 1
- Podvozek BUNKERPRO X 1
- Počítač (operační systém WINDOWS) X 1
Software pro upgrade firmwaru - https://github.com/agilexrobotics/agilex_firmware
- Před připojením se ujistěte, že je odpojeno napájení podvozku robota;
- Použijte sériový kabel pro připojení k sériovému portu upgradu podvozku BUNKERPRO (vyžaduje demontáž zadní elektrické desky); připojte sériový kabel k počítači;
- Otevřete klientský software;
- Vyberte číslo portu;
- Zapněte šasi UNKERPRO a okamžitě klikněte na „Start Connection“ (šasi počká 3 s, než se zapne, pokud čas překročí 6 s, vstoupí do aplikace); pokud je připojení úspěšné, v textovém poli se zobrazí výzva „Připojeno úspěšně“;
- Načíst přihrádku file;
- Klikněte na tlačítko Upgrade a počkejte na výzvu k dokončení aktualizace;
- Odpojte sériový kabel, vypněte skříň a znovu ji zapněte.

Obrázek 3.3 Klientské rozhraní upgradu firmwaru
Použití balíčku BUNKERPRO ROS Přample
ROS poskytuje některé standardní služby operačního systému, jako je abstrakce hardwaru, nízkoúrovňová kontrola zařízení, implementace společných funkcí, správa meziprocesových zpráv a datových paketů. ROS je založen na grafové architektuře, takže procesy různých uzlů mohou přijímat, uvolňovat a agregovat různé informace (jako je snímání, řízení, stav, plánování atd.). V současné době ROS podporuje hlavně UBUNTU.
Vývojová příprava
Hardwarová příprava
- CAN light může komunikační modul X1
- Think pad E470 notebook X1 AGILEX BUNKERPRO mobilní robotický podvozek X1
- AGILEX BUNKERPRO s podporou dálkového ovládání FS-i6s X1
- AGILEX BUNKERPRO špičková letecká zásuvka X1
Použijte examppopis prostředí
- Ubuntu 16.04 LTS(Toto je testovací verze, testovaná na Ubuntu 18.04 LTS)
- ROS Kinetic(Následné verze jsou také testovány)
- Git
Zapojení a příprava hardwaru
- Vytáhněte kabel CAN horní letecké zástrčky BUNKERPRO nebo zadní zástrčky a připojte CAN_H a CAN_L v kabelu CAN k adaptéru CAN_TO_USB;
- Zapněte knoflíkový spínač na podvozku mobilního robota BUNKERPRO a zkontrolujte, zda jsou nouzové vypínače na obou stranách uvolněné;
- Připojte CAN_TO_USB k USB rozhraní notebooku. Schéma zapojení je na obrázku 3.4.
Instalace ROS a nastavení prostředí
Podrobnosti o instalaci viz http://wiki.ros.org/kinetic/Installa-tion/Ubuntu
Otestujte CANABLE hardware a CAN komunikaci
Nastavte adaptér CAN-TO-USB
- Povolit modul jádra gs_usb $ sudo modprobe gs_usb
- Nastavte přenosovou rychlost 500 kB a povolte adaptér can-usb $ sudo ip link set can0 up type can bitrate 500000 XNUMX
- Pokud v předchozích krocích nenastala žádná chyba, měli byste být schopni příkaz použít view zařízení plechovky okamžitě $ ifconfig -a
- Nainstalujte a použijte can-utils k testování hardwaru $ sudo apt install can-utils
- Pokud byl tentokrát can-to-usb připojen k robotu BUNKERPRO a vozidlo bylo zapnuto, použijte následující příkazy ke sledování dat z podvozku BUNKERPRO $ candump can0
- Referenční zdroje:
[1]https://github.com/agilexrobotics/agx_sdk
[2]https://wiki.rdu.im/_pages/Notes/Embed-dedSystem/Linux/can-bus-in-linux.html - Stáhněte si balíček závislý na ros
AGILEX BUNKERPRO ROS PACKAGE stáhněte a zkompilujte
$ sudo apt install ros-$ROS_DISTRO-teleop-twist-key- board
$ sudo apt install libasio-dev
• Klonovat a kompilovat zdrojový kód bunker_ros
$ cd ~/catkin_ws/src
$ git klon https://github.com/agilexrobotics/ugv_sdk.git
$ git klon https://github.com/agilexrobotics/bunker_ros.git
$ cd..
$ catkin_make
Referenční zdroj:
https://github.com/agilexrobotics/bunker_ros
Spusťte uzly ROS
- Spusťte základní uzel
$ roslaunch bunker_bringup bunker_minimal.launch - Spusťte uzel dálkového ovládání klávesnice
$ roslaunch bunker_bringup bunker_teleop_keyboard.launch
Opatření
Tato část obsahuje některá opatření pro používání a vývoj BUNKERPRO.
Opatření pro baterie
- Když BUNKERPRO opustí továrnu, baterie není plně nabitá. Konkrétní výkon baterie lze zobrazit pomocí voltage displej měřiče na zadní straně šasi BUNKERPRO nebo čtení přes komunikační rozhraní sběrnice CAN;
- Po vybití baterie nenabíjejte baterii. Nabijte jej prosím včas, když je nízká voltage vzadu BUNKERPRO je nižší než 48V; Podmínky statického skladování: Nejlepší teplota pro skladování baterie je -10°C~45°C; v případě uskladnění pro nepoužívání je nutné baterii dobít a vybít jednou za 1 měsíc a poté uskladnit v plném objemutage stát. Nevhazujte baterii do ohně ani ji nezahřívejte a neskladujte baterii v prostředí s vysokou teplotou;
- Nabíjení: Baterie musí být nabíjena speciální nabíječkou lithiových baterií. Nenabíjejte baterii pod 0 °C a nepoužívejte baterie, napájecí zdroje a nabíječky, které nejsou standardní.
Opatření pro provozní prostředí
- Provozní teplota BUNKERPRO je 20℃~60℃; nepoužívejte jej v prostředí, kde je teplota nižší než 20 ℃ nebo vyšší než 60 ℃;
- Požadavky na relativní vlhkost provozního prostředí BUNKERPRO jsou: maximálně 80 %, minimálně 30 %;
- Prosím, nepoužívejte jej v prostředí s korozivním a hořlavým plynem nebo v prostředí v blízkosti hořlavých látek;
- Neskladujte jej v blízkosti topných těles, jako jsou ohřívače nebo velké vinuté odpory;
- Doporučuje se, aby nadmořská výška operačního prostředí nepřesáhla 1000 m; Doporučuje se, aby teplotní rozdíl mezi dnem a nocí v provozním prostředí nepřesáhl 25°C;
- Pravidelně kontrolujte a udržujte napínací kolo pásu.
Opatření pro elektrické externí prodloužení
- Proud zadního prodlužovacího napájecího zdroje by neměl překročit 10A a celkový výkon by neměl překročit 480W;
Bezpečnostní opatření
- V případě jakýchkoli pochybností během používání postupujte podle příslušného návodu k použití nebo se poraďte s příslušným technickým personálem;
- Před použitím věnujte pozornost stavu v terénu a vyhněte se nesprávné obsluze, která způsobí problémy s bezpečností personálu;
- V případě nouze stiskněte tlačítko nouzového zastavení a vypněte zařízení;
- Bez technické podpory a povolení prosím osobně neupravujte vnitřní strukturu zařízení.
Další opatření
- Při přenášení a nastavování nepouštějte vozidlo vzhůru nohama;
- Pro neprofesionály prosím nerozebírejte vozidlo bez povolení.
Otázky a odpovědi
– Nejprve zkontrolujte, zda je stisknutý vypínač; a poté potvrďte, zda je režim ovládání vybraný pomocí přepínače režimu na levé horní straně dálkového ovladače správný.
– Za normálních okolností, pokud lze BUNKERPRO ovládat dálkovým ovladačem, znamená to, že ovládání pohybu podvozku je normální; pokud může přijímat zpětnovazební rám podvozku, znamená to, že prodlužovací spoj CAN je normální. Zkontrolujte, zda je příkaz přepnut do režimu ovládání plechovky.
– BUNKERPRO má uvnitř mechanismus ochrany komunikace. Šasi má ochranný mechanismus timeout při zpracovávání řídicích příkazů CAN zvenčí. Předpokládejme, že poté, co vozidlo přijme rámec komunikačního protokolu, ale nepřijme další rámec řídicího příkazu po dobu delší než 500MS, vstoupí do ochrany komunikace a jeho rychlost je 0. Proto musí příkazy z hostitelského počítače vydávat pravidelně.
Rozměry produktu
Ilustrační schéma rozměrů produktu


Ilustrační schéma rozměrů horní rozšířené podpory

AgileX Robotics (Dongguan) CO., Ltd.
WWW.AGILEX.AI
TEL: + 86-0769-22892150
MOBIL: +86-19925374409

Dokumenty / zdroje
 |
Pásový mobilní robot AgileX Bunker Pro [pdfUživatelská příručka Bunker Pro Pásový mobilní robot, Bunker Pro, Pásový mobilní robot, Mobilní robot |



