Uživatelská příručka ovladače krokového motoru TRINAMIC TMCM-1180

TRINAMIC Motion Control GmbH & Co. KG Hamburg, Německo www.trinamic.com
Staženo z Arrow.com.
1 Vlastnosti
PD86-1180 je plně mechatronické řešení se sadou nejmodernějších funkcí. Je vysoce integrovaný a nabízí pohodlnou manipulaci. PD86-1180 se skládá z krokového motoru NEMA 34 (velikost příruby 86 mm), elektroniky ovladače/ovladače a integrovaného kodéru. TMCM-1180 je inteligentní modul regulátoru a ovladače krokového motoru s novou vynikající technologií coolStepTM pro bezsenzorové řízení proudu závislého na zatížení. To umožňuje energeticky účinný provoz motoru. S pokročilou funkcí stallGuard2TM lze detekovat zatížení motoru s vysokým rozlišením. Modul je navržen pro montáž přímo na 86mm přírubový QMot krokový motor.
HLAVNÍ RYSY
Elektrická data
– Zásobování svtage: Nominální +24V DC nebo +48V DC
– Proud motoru: až 5.5A RMS (programovatelné)
Motor PANdrive
– Dvoufázový bipolární krokový motor s jmenovitým proudem až 5.5A RMS. proud cívky
– Utahovací moment: 7Nm
Kodér
– Integrovaný magnetický enkodér sensOstep (max. 256 inkrementů na otáčku), např. pro detekci ztráty kroku za všech provozních podmínek a polohování
Integrovaný ovladač pohybu
– Motion profile výpočet v reálném čase (kontrolér pohybu TMC428/429)
– Průběžná změna parametrů motoru (např. poloha, rychlost, zrychlení)
– Vysoce výkonný mikrokontrolér pro celkové řízení systému a zpracování sériového komunikačního protokolu
Ovladač bipolárního krokového motoru
– Až 256 mikrokroků na celý krok
- Vysoce účinný provoz, nízká ztráta energie
– Dynamická regulace proudu
– Integrovaná ochrana
– funkce stallGuard2 pro detekci zablokování
– funkce coolStep pro snížení spotřeby energie a odvodu tepla
Rozhraní
– vstupy pro stop spínače (levý a pravý) a domovský spínač
– univerzální vstupy a 2 univerzální výstupy
– Komunikační rozhraní USB, RS232, RS485 a CAN (2.0B až 1Mbit/s)
Bezpečnostní prvky
– Vstup pro vypnutí. Ovladač bude hardwarově deaktivován, dokud tento kolík zůstane otevřený nebo zkratovaný k zemi
– Samostatná dodávka objtage vstupy pro driver a digitální logiku – napájení driveru svtage může být externě vypnuto při napájení digitální logiky, a proto digitální logika zůstává aktivní
Software
– K dispozici s TMCL™ nebo CANopen
– Samostatný provoz TMCL nebo dálkově ovládaný provoz
– Programová paměť (nezávislá) pro až 2048 příkazů TMCL
– Software pro vývoj aplikací na bázi PC TMCL-IDE dostupný zdarma
– CANopen: CiA 301 + CiA 402 (režim navádění, profile režim polohy a režim rychlosti).
Další informace naleznete v samostatných příručkách firmwaru TMCL a CANopen
2 Objednávkové kódy
Kabely nejsou součástí dodávky. V případě potřeby přidejte do objednávky vhodný kabelový svazek.

3 Mechanické a elektrické rozhraní
3.1 Rozměry a montážní otvory TMCM-1180
Rozměry desky řadiče/ovladače (TMCM-1180) jsou cca. 86 mm x 86 mm, aby se vešly na zadní stranu 86 mm krokového motoru. TMCM-1180 je vysoký 21.5 mm bez odpovídajících konektorů. K dispozici jsou čtyři montážní otvory pro šrouby M4.

3.2 Rozměry a specifikace motoru PD86-1180
PD86-1180 obsahuje elektronický modul řadiče / ovladače krokového motoru TMCM-1180, magnetický kodér založený na technologii sensOstep a bipolární hybridní krokový motor o velikosti 86 mm.
3.2.1 Rozměry PD86-3-1180

3.2.2 Specifikace motoru QSH8618-96-55-700

3.2.3 Obrázek točivého momentu QSH8618-96-55-700
Obrázek krouticího momentu uvádí charakteristiku krouticího momentu motoru pro plný krokový provoz, aby bylo možné jednoduché srovnání. Pro plný krokový provoz je vždy několik rezonančních bodů (s menším kroutícím momentem), které nejsou zobrazeny. Ty budou minimalizovány mikrokrokovým provozem.

3.3 Konektory TMCM-1180
Deska ovladače/ovladače PD86-1180 nabízí osm konektorů včetně konektoru motoru, který se používá interně pro připojení cívek motoru k elektronice. Kromě napájecího konektoru jsou zde dva konektory pro sériovou komunikaci (jeden pro mini-USB a jeden pro RS232/RS485/CAN) a dva konektory pro další vstupní a výstupní signály. Dále je zde jeden konektor pro krok/směr a druhý pro kodér. Výstupní konektor nabízí dva univerzální výstupy, jeden napájecí objtage výstup a jeden vstup pro vypnutí hardwaru. Ponechání vypínacího vstupu otevřeného nebo jeho přivázání k zemi deaktivuje ovladače motorutage v hardwaru. Pro provoz by měl být tento vstup vázán na napájecí objtagE. Vstupní konektor nabízí dva vstupy pro spínače stop (levý a pravý), jeden vstup domovního spínače, dva vstupy pro všeobecné použití a jedno připojení k systému nebo signální zemi.



3.3.1 napájecí konektor
Tento modul nabízí samostatné napájecí vstupy pro digitální logiku (pin 2) a driver/power stage (kolík 1). Oba napájecí vstupy používají společné uzemnění (pin 3 a 4). Tímto způsobem je napájení pro řidiče stage může být vypnuto při zachování informací o poloze a stavu při udržování napájení digitální logiky aktivní.
+POUZE UDRIVER SUPPLY V případě, že je napájení poskytováno pouze do výkonové části, bude vnitřní dioda distribuovat napájení také do logické části. Pokud tedy nejsou vyžadovány samostatné napájecí zdroje, je možné pouze použít pin 1 a 4 pro napájení modulu.

Pro zajištění spolehlivého provozu jednotky musí mít zdroj dostatečný výstupní kondenzátor a napájecí kabely by měly mít nízký odpor, aby při provozu chopperu nedocházelo ke zvýšenému zvlnění zdroje přímo na jednotce. Zvlnění napájecího zdroje v důsledku provozu chopperu by mělo být udržováno na maximálně několika 100 mV.
RADY PRO NAPÁJENÍ
– udržujte napájecí kabely co nejkratší
– pro napájecí kabely používejte velké průměry

3.3.2 Konektor sériové komunikace
Pro sériovou komunikaci se používá 2mm rozteč 8pinový konektor. S tímto konektorem modul podporuje komunikaci RS232, RS485 a CAN.

3.3.3 USB konektor
Na desce je k dispozici 5kolíkový konektor mini-USB (může záviset na možnosti sestavení).

3.3.4 Výstupní konektor
Pro připojení dvou univerzálních výstupů a driverů se používá 2mm rozteč 4pinový konektortage vstupní kolík hardwarového vypnutí k jednotce.
Aby bylo možné povolit ovladač motoru stage připojte /Shutdown (pin 2) k +ULogic (pin 1)!


3.3.5 Vstupní konektor
2mm rozteč 6pinový konektor se používá pro připojení všeobecných vstupů, domácích a stop spínačů k jednotce.
Pouzdro protikusu konektoru: PHR-6 Kontakty konektoru: SPH-002T-P0.5S

3.2.5.1 Levý a pravý koncový spínač
TMCM-1180 lze nakonfigurovat tak, aby motor měl levý a pravý koncový spínač (obrázek 4.9).
Motor se zastaví, když cestující dosáhne jednoho z koncových spínačů.

3.2.5.2 Konfigurace trojitého spínače
Je možné naprogramovat toleranční rozsah kolem polohy referenčního spínače. To je užitečné pro konfiguraci trojitého přepínače, jak je znázorněno na obrázku 4.10. V této konfiguraci se dva spínače používají jako automatické zastavovací spínače a jeden další spínač se používá jako referenční spínač mezi levým a pravým stop spínačem. Levý stop spínač a referenční spínač jsou propojeny. Středový spínač (pojezdový spínač) umožňuje sledování osy, aby bylo možné detekovat ztrátu kroku.

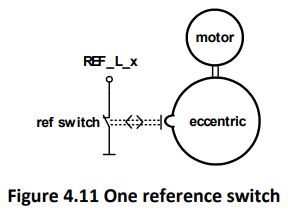
3.2.5.3 Jeden koncový spínač pro kruhové systémy
Pokud je použit kruhový systém (obrázek 4.11), je nutný pouze jeden referenční spínač, protože v takovém systému nejsou žádné koncové body.
3.3.6 Krokový/směrový konektor
Pro připojení Step/Dir rozhraní se používá 2mm rozteč 4pinový konektor.

3.3.7 Konektor kodéru
Pro připojení kodéru se používá 2mm rozteč 5pinový konektor.
Pouzdro protikusu konektoru: PHR-5 Kontakty konektoru: SPH-002T-P0.5S

3.3.8 Konektor motoru a specifikace
Pro připojení motoru se používá 3.96mm rozteč 4pinový konektor. K tomuto konektoru jsou připojena obě vinutí cívky motoru (bipolární krokový motor).
Pouzdro protikusu konektoru: VHR-4N Kontakty protikusu konektoru: BVH-21T-P1.1

4 Propojky
Většina nastavení desky se provádí pomocí softwaru. Přesto je k dispozici několik propojek pro konfiguraci.

4.1 Ukončení sběrnice RS485
Součástí desky je odpor 120 Ohm pro správné ukončení sběrnice rozhraní RS485. Když je tato propojka sepnutá, odpor bude umístěn mezi dvě diferenciální sběrnice RS485+ a RS485-.
4.2 Ukončení sběrnice CAN
Deska obsahuje odpor 120 Ohm pro správné ukončení sběrnice rozhraní CAN. Když je tato propojka uzavřena, odpor bude umístěn mezi dvě diferenciální sběrnice CAN_H a CAN_L.
5 Provozní hodnocení
Provozní jmenovité hodnoty uvedené níže by měly být použity jako návrhové hodnoty. V žádném případě nesmí být během provozu překročeny maximální hodnoty.

*) Elektronika ovladače ovladače byla testována v klimatické komoře běžící na plný proud (5.5A RMS) po dobu 30 minut bez proudění vzduchu při okolní teplotě 50°C.
Motor se může zahřát výrazně nad 50 °C, když běží na plný proud bez řádného chlazení. To může podstatně zvýšit teplotu prostředí pro elektroniku. Při použití provozního režimu coolStep může být skutečný proud podstatně nižší než naprogramovaný max. produkce proudu a teploty.
6 Popis funkce
Na obrázku 7.1 jsou zobrazeny hlavní části PD86-1180. PANdrive se skládá hlavně z µC (připojeného k paměti EEPROM TMCL), ovladače pohybu TMC428/429, napájecího ovladače TMC262A-PC s energeticky účinnou funkcí coolStep, externího ovladače MOSFET stage, krokový motor QSH8618 a integrovaný enkodér sensOstep. Alternativně je možné připojit externí enkodér. Jmenovitá dodávka objtagjsou 24VDC nebo 48VDC.

6.1 Architektura systému
TMCM-1180 integruje mikrokontrolér s operačním systémem TMCL (Trinamic Motion Control Language). Úlohy řízení pohybu v reálném čase jsou realizovány pomocí TMC428/429.
Mikrokontrolér 6.1.1
Na tomto modulu se Atmel AT91SAM7X256 používá ke spuštění operačního systému TMCL a ovládání TMC428/429. CPU má 256 KB flash paměti a 64 KB RAM. Na mikrokontroléru běží operační systém TMCL (Trinamic Motion Control Language), který umožňuje provádět příkazy TMCL, které jsou do modulu odesílány z hostitele přes rozhraní RS232, RS485, USB nebo CAN. Mikrokontrolér interpretuje příkazy TMCL a řídí TMC428/429, který vykonává příkazy pohybu. Navíc je propojen s rozhraním kodéru a zpracovává vstupy. Flash ROM mikrokontroléru obsahuje operační systém TMCL. Operační systém TMCL lze aktualizovat přes rozhraní RS232 nebo přes rozhraní CAN. K tomu použijte TMCL-IDE.
6.1.2 EEPROM
Pro uložení programů TMCL pro samostatný provoz je modul TMCM-1180 vybaven 16kByte EEPROM připojenou k mikrokontroléru. EEPROM může ukládat programy TMCL sestávající z až 2048 příkazů TMCL. EEPROM se také používá k ukládání konfiguračních dat.
6.1.3 Ovladač pohybu
TMC428/429 je vysoce výkonný integrovaný obvod pro řízení krokových motorů a může ovládat až tři 2fázové krokové motory. Parametry pohybu, jako je rychlost nebo zrychlení, jsou mikrokontrolérem odesílány do TMC428/429 přes SPI. Výpočet ramps a rychlost profiles jsou prováděny interně hardwarem na základě parametrů cílového pohybu.
6.1.4 Ovladač krokového motoru
TMC262A-PC je energeticky účinný vysokoproudový vysoce přesný mikrokrokový ovladač IC pro bipolární krokové motory. Tento ovladač na modulu TMCM-1180 je speciální verzí napájecího ovladače TMC262 pro PANdrives s motory QSH8618.
Jeho unikátní bezsenzorová detekce zátěže s vysokým rozlišením stallGuard2 se používá pro speciální integrovanou funkci řízení proudu v závislosti na zátěži nazývanou coolStep. Schopnost číst zatížení a detekovat přetížení dělá z TMC262 optimální volbu pro pohony, kde je požadována vysoká spolehlivost. TMC262 může být řízen krokovými/směrovými signály i sériovým SPITM.

Regulátor proudu coolStep umožňuje řídit reakci řidiče na zvýšení nebo snížení zátěže. Interní regulátor používá dvě prahové hodnoty k určení minimálního a maximálního úhlu zatížení pro optimální provoz motoru. Aktuální rychlost zvyšování a aktuální rychlost snižování lze přizpůsobit aplikaci. Kromě toho lze spodní proudový limit nastavit ve vztahu k hornímu proudovému limitu nastavenému parametrem proudové stupnice CS.
6.1.5 sensOstep Encoder
Kodér sensOstep použitý v této jednotce je založen na systému magnetického kodéru úhlu polohy s nízkým rozlišením. Skládá se z malého magnetu umístěného na zadním konci osy krokového motoru a IC Hallova senzoru s integrovaným digitálním zpracováním signálu (např. pro automatické řízení zesílení, teplotní kompenzaci atd.) umístěného nad magnetem na zadní straně motoru. osazená deska s plošnými spoji. Kodér nabízí rozlišení 8 bitů (256 kroků) na otáčku, což je zcela dostačující pro detekci krokových ztrát se standardními 1.8° krokovými motory.
7 TMCM-1180 Popis provozu
7.1 Výpočet: Rychlost a zrychlení vs. mikrokrok a frekvence plného kroku
Hodnoty parametrů odeslané do TMC428/429 nemají typické hodnoty motoru jako otáčky za sekundu jako rychlost. Tyto hodnoty však lze vypočítat z parametrů TMC428/429, jak je uvedeno v této části.


8 TMCL
TMCL, jazyk TRINAMIC Motion Control Language, je popsán v samostatné dokumentaci, která odkazuje na konkrétní produkty (např. TMCM-1180 TMCL Firmware Manual). Příručky jsou k dispozici na www.trinamic.com. Aktualizované datové listy a poznámky k aplikaci naleznete v tomto zdroji.
9 CANopen
Modul TMCM-1180 by měl být v budoucích verzích používán také s protokolem CANopen. Pro tento účel je vyvíjen speciální firmware CANopen. Pokud máte o tuto možnost zájem, kontaktujte prosím TRINAMIC.
10 Zásady podpory života
TRINAMIC Motion Control GmbH & Co. KG nepovoluje ani neposkytuje záruku na žádný ze svých produktů pro použití v systémech podpory života bez výslovného písemného souhlasu TRINAMIC Motion Control GmbH & Co. KG.
Systémy na podporu života jsou zařízení určená k podpoře nebo udržení života, u jehož selhání při správném používání v souladu s poskytnutými pokyny lze důvodně očekávat, že bude mít za následek zranění nebo smrt.
© TRINAMIC Motion Control GmbH & Co. KG 2013 Informace uvedené v tomto technickém listu jsou považovány za přesné a spolehlivé. Nepřebírá se však odpovědnost za důsledky jeho použití ani za jakékoli porušení patentů nebo jiných práv třetích osob, které může z jeho použití vyplývat. Specifikace se mohou bez upozornění změnit. Všechny použité ochranné známky jsou majetkem příslušných vlastníků.

11 Historie revizí
11.1 Revize hardwaru

11.2 Revize hardwaru

12 Reference
[TMCM-1180 / PD86-1180 TMCL] Firmware manuál TMCM-1180 a PD86-1180 TMCL[TMCL-IDE] Uživatelská příručka TMCL-IDE
[QSH8618] QSH8618 Manuál
Viz www.trinamic.com.
Dokumenty / zdroje
 |
Ovladač krokového motoru TRINAMIC TMCM-1180 [pdfUživatelská příručka TMCM-1180 Ovladač krokového motoru, TMCM-1180, Ovladač krokového motoru, Ovladač motoru, Ovladač |