![]()
Krokový ovladač T86-IO s uzavřenou smyčkou
Uživatelská příručka
Shenzhen Rtelligent Mechanical Electrical Technology Co.,ltd
Produkt skončilview
Děkujeme, že jste si vybrali digitální krokový servo ovladač řady Rtelligent T. Krokové servo je schéma krokového motoru vytvořené na základě běžného krokového motoru s otevřenou smyčkou v kombinaci s polohovou zpětnou vazbou a servo algoritmem, které se vyznačuje vysokou rychlostí, vysokým točivým momentem, vysokou přesností, nízkými vibracemi, nízkým zahříváním a bez ztráty kroku. Krokový servo ovladač řady T, založený na nové 32bitové procesorové čipové platformě DSP, používá v servo ovladači řízení orientované na pole (FOC) a algoritmus vektorového zeslabování pole, který ve všech aspektech překonává běžný krokový ovladač. .
- Vestavěná funkce nastavení parametrů PID umožňuje motoru lépe vyhovět aplikacím různých druhů zátěží.
- Vestavěný řídicí algoritmus zeslabování pole způsobuje, že motor snižuje charakteristiky magnetického pole a udržuje výkon při vysoké rychlosti.
- Díky vestavěné funkci vektorového řízení proudu má motor proudovou charakteristiku serva a nízkého zahřívání.
- Vestavěný algoritmus příkazu mikrokrokování umožňuje motoru běžet při zachování stabilních a nízkých vibrací při různých rychlostech.
- Zpětná vazba kodéru s vestavěným rozlišením 4000 pulzů zvyšuje přesnost polohování a nikdy neztrácí krok.
Závěrem lze říci, že schéma řízení serva kombinované s charakteristikami krokového motoru umožňuje krokovému servomotoru řady T lépe vyvinout výkon krokového motoru, který může nahradit aplikaci serva se stejným výkonem. Je to nová volba optimálního nákladového výkonu pro automatizační zařízení.
Ovladač T86-IO může nastavit dělení a další parametry pomocí přepínače DIP a ladícího softwaru. Má ochranné funkce jako zvtage, proud a poloha a přidává rozhraní výstupu alarmu. Jeho vstupní a výstupní řídicí signály jsou opticky odděleny.
| Napájení | 20-80 VAC 24 –100 VDC |
| Přesnost ovládání | 4000 Puls/r |
| Kontrola proudu | Algoritmus vektorového řízení serva |
| Nastavení rychlosti | Nastavení přepínače DIP nebo nastavení softwaru pro ladění |
| Rozsah rychlosti | Konvenční 1200 ~ 1500 ot./min., až 4000 ot./min |
| Potlačení rezonance | Automaticky vypočítá rezonanční bod a potlačí mezifrekvenční vibrace |
| Úprava parametrů PID | Testovací software pro úpravu charakteristik PID motoru |
| Pulzní filtrace | 2MHz digitální signálový filtr |
| Výstup alarmu | Alarmový výstup nadproudu, přepětítage, chyba polohy atd |
Doufáme, že naše produkty s vynikajícím výkonem vám pomohou úspěšně dokončit program sportovní kontroly.
Před použitím produktů si přečtěte tento technický manuál.
Prostředí aplikace a instalace
Environmentální požadavek
| Položka | Rtelligent T86-IO |
| Instalační prostředí | Vyhněte se prachu, oleji a korozivnímu prostředí |
| Vibrace | 0.5G(4.9m/s2)Max |
| Provozní teplota/vlhkost | 0℃ ~ 45℃ / 90% RH nebo méně (bez kondenzace) |
| Skladovací a přepravní teplota: | -10 ℃ ~ 70 ℃ |
| Chlazení | Přirozené chlazení / mimo zdroj tepla |
| Vodotěsná třída | IP54 |
Rozměry instalace ovladače

Požadavky na instalaci ovladače
Nainstalujte ovladač svisle nebo vodorovně tak, aby jeho přední část směřovala dopředu a horní část směřovala nahoru, aby se usnadnilo chlazení.
Během montáže zabraňte vniknutí vrtů a jiných cizích předmětů dovnitř ovladače.
Při montáži použijte k upevnění šroub M3.
Pokud je v blízkosti místa instalace zdroj vibrací (např. vrtačka), použijte tlumič vibrací nebo pryžové těsnění odolné proti vibracím.
Pokud je v rozvaděči instalováno více ovladačů, věnujte prosím pozornost tomu, abyste si vyhradili dostatek místa pro dostatečný odvod tepla. V případě potřeby můžete nakonfigurovat chladicí ventilátory pro zajištění dobrých podmínek pro odvod tepla v rozvaděči.
Port ovladače a připojení
Popis funkce portu
| Funkce | Stupeň | Definice | Poznámky |
| Vstup napájení | AC | Vstupní AC napájení | AC 20-80V DC 24-100V |
| AC | Vstupní AC napájení | ||
| Připojení motoru | A+ | Kladná svorka vinutí fáze A | Červený |
| A- | Záporná svorka vinutí fáze A | Žluť | |
| B+ | Kladná svorka vinutí fáze B | Černý | |
| B- | Záporná svorka vinutí fáze B | Zelený | |
| Připojení kodéru | EB+ | Kladná svorka fáze B kodéru | Zelený |
| EB- | Záporná svorka fáze B kodéru | Žluť | |
| EA+ | Kladná svorka fáze A kodéru | Hnědý | |
| EA- | Záporná svorka fáze A kodéru | Bílý | |
| VCC | Pracovní výkon kodéru 5V pozitivní | Červený | |
| GND | Pracovní výkon kodéru 5V zemnící svorka | Modrý | |
| Pulzní připojení | PUL+ | Spusťte vstupní rozhraní | úroveň 24V |
| PUL- | |||
| D1R+ | Rozhraní pro zadávání směru | ||
| DIR- | |||
| Povolit terminál | ENA+ | Povolit ovládací rozhraní | |
| ENA- | |||
| Mannův výstup | ALM+ | Mann výstupní rozhraní | 24V. níže |
| ALM- | |||
| Výstup na místě | Pend+ | 40mA Výstupní rozhraní na místě | |
| Čeká- |
Vstup napájení
Napájecí zdroj budiče může být střídavý i stejnosměrný a vstupní objtagRozsah je 20V~80VAC nebo 24V~100VDC.
Nepřipojujte se přímo ke komerční elektřině (220VAC)!
Reference pro výběr napájení:
svtage:
Krokový motor má charakteristiku poklesu točivého momentu s nárůstem otáček motoru a vstupního objtage ovlivní ampmíra snížení točivého momentu při vysokých otáčkách. Správně zvyšteasing objemtage vstupního napájecího zdroje může zvýšit výstupní točivý moment motoru při vysokých otáčkách.
Krokové servo má vyšší rychlost a točivý moment než běžné steppery. Pokud tedy chcete získat lepší vysokorychlostní výkon, musíte zvýšit objem napájenítage řidiče.
Proud:
Pracovním procesem ovladače je převést vstupní vysokoobjemtage a slaboproudé napájení do nntage a vysokoproudé na obou koncích vinutí motoru. Při skutečném použití by měl být zvolen vhodný napájecí zdroj podle modelu motoru, zatěžovacího momentu a dalších faktorů.
Účinky regenerace svtage:
Když krokový motor pracuje, zachovává si také vlastnosti generátoru. Při zpomalování se kinetická energie akumulovaná zátěží přemění na elektrickou energii a superponuje se na obvod budiče a vstupní napájení.
Věnujte pozornost nastavení doby zrychlení a zpomalení, abyste chránili řidiče nebo napájení.
Když je driver vypnutý, uvidíte rozsvícenou LED kontrolku driveru, když je zátěž zatažena, aby se motor rozhýbal, což je také ovlivněno.
Připojení kodéru
Kodér T86-IO má diferenciální výstup A/B a při použití je zapojen v odpovídajícím pořadí.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Zelený | Žluť | Hnědý | Bílý | Červený | Modrý |
Rtelligent je vybaven kabelem kodéru určité délky, zakupte si prodlužovací kabely různých délek podle potřeb instalace.
Připojení motoru
Odpovídající motor ovladače T86-IO je odpovídající krokový servomotor řady T a jeho odpovídající pořadí připojení motoru je pevné a jedinečné.

| A+ | Červený |
| A- | Žluť |
| B+ | Černý |
| B- | Zelený |
Připojení řídicího signálu
PUL, DIR Port: připojení pro příkaz start a stop
| a indikaci směru | 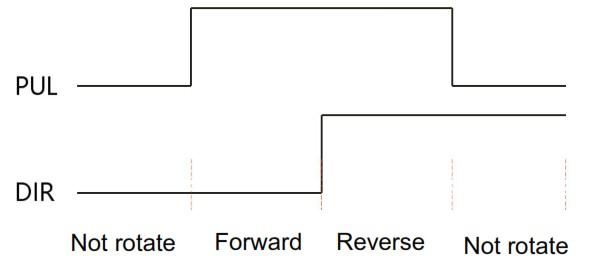 |
| 1. Při zapnutí PUL a vypnutí DIR se motor spustí, aby se otáčel dopředu. Po vypnutí PUL se motor zpomalí a zastaví. 2. Při zapnutém PUL a DIR se motor spustí, aby se otočil zpět. Po vypnutí PUL se motor zpomalí a zastaví. 3.Při vypnutí PUL se motor zastaví. |
Port ENA: povolit/zakázat
Když je interní optočlen vypnutý, budič vysílá proud do motoru;
Když je interní optočlen zapnutý, ovladač přeruší proud každé fáze motoru, aby se motor uvolnil, a krokový impuls nebude reagovat.
Když je motor v chybovém stavu, automaticky se vypne. Logiku úrovně signálu povolení lze nastavit opačně.
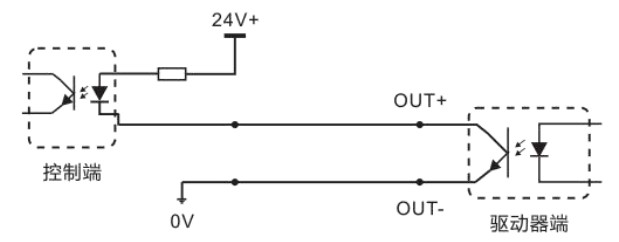
ALM, Pend port: používá se pro alarm a výstup na místě.
Port ALM se používá pro výstup provozního stavu ovladače do externího řídicího obvodu. Když je ovladač v chybovém stavu a normálním pracovním stavu, ALM vydává různé úrovně optočlenu.
Port Pend se používá k výstupu signálu ovladače na místě. Když je rozdíl (odchylka polohy) mezi polohou pulzního příkazu zaslanou horním počítačem a aktuální polohou krokového servomotoru menší než nastavená hodnota, je na výstupu signál na místě. Horní počítač přijme signál a potvrdí, že polohování je dokončeno.
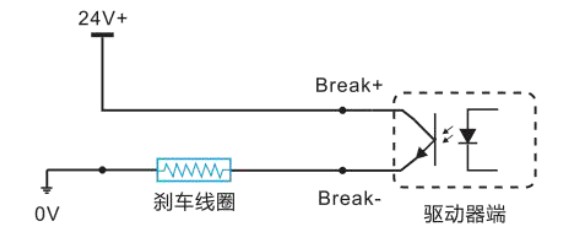
Navíc lze porty ALM a Pend znovu použít jako signál ovládání brzdy (přerušení) pomocí softwarového nastavení, které se používá k ovládání brzdového spínače krokového servomotoru s brzdou. Vzhledem k tomu, že brzdová cívka je indukční zátěž a zahřívání cívky je vážné, když motor běží, mohou si zákazníci vybrat speciální brzdový regulátor podle svých potřeb, aby se snížilo zahřívání brzd a zlepšila se životnost a spolehlivost.
 Rtelligent poskytuje řešení pro vyhrazené ovladače brzd, napřampsoubory jsou následující:
Rtelligent poskytuje řešení pro vyhrazené ovladače brzd, napřampsoubory jsou následující:
Sériový port RS232

| S/N | Symbol | Popis |
| 1 | NC | |
| 2 | +5V | Kladná svorka napájecího zdroje |
| 3 | TxD | Vysílací terminál RS232 |
| 4 | GND | Zemnící svorka napájecího zdroje |
| 5 | RxD | Přijímací terminál RS232 |
| 6 | NC |
Sériový port RS232 se používá pro připojení testovacího softwaru T86-IO a změnu dalších souvisejících provozních parametrů ovladače.
Nastavení DIP přepínačů a provozních parametrů

Nastavení rychlosti
| Rychlost | SVV1 | SW2 | SW3 | SW4 | Poznámky |
| 100 | on | on | on | on | Ostatní rychlosti lze přizpůsobit |
| 150 | vypnuto | on | on | on | |
| 200 | on | vypnuto | on | on | |
| 250 | vypnuto | vypnuto | on | on | |
| 300 | on | on | vypnuto | on | |
| 400 | vypnuto | on | vypnuto | on | |
| 500 | on | vypnuto | vypnuto | on | |
| 600 | vypnuto | vypnuto | vypnuto | on | |
| 700 | on | on | on | vypnuto | |
| 800 | vypnuto | on | on | vypnuto | |
| 900 | on | vypnuto | on | vypnuto | |
| 1000 | vypnuto | vypnuto | on | vypnuto | |
| 1100 | on | on | vypnuto | vypnuto | |
| 1200 | vypnuto | on | vypnuto | vypnuto | |
| 1300 | on | vypnuto | vypnuto | vypnuto | |
| 1400 | vypnuto | vypnuto | vypnuto | vypnuto |
Volba směru motoru
DIP SW5 se používá k nastavení směru chodu motoru pod počátečním impulsem. „Vypnuto“ znamená, že směr motoru je proti směru hodinových ručiček při vstupu počátečního impulsu; „Zapnuto“ znamená, že směr motoru je při vstupu počátečního impulsu ve směru hodinových ručiček. Počáteční impuls je testovací impuls použitý při vývoji softwaru ovladače; Podívejte se prosím na skutečný směr chodu motoru.
Volba otevřené/uzavřené smyčky
DIP SW8 se používá k nastavení režimu ovládání řidiče.
„Vypnuto“ znamená režim řízení se zpětnou vazbou;
„Zapnuto“ znamená režim řízení s otevřenou smyčkou a lze jej použít k testování motoru.
LED indikace pracovního stavu řidiče
| Stav LED | Stav řidiče | |
| Zelený indikátor svítí dlouhou dobu | Ovladač není povolen | |
| Zelený indikátor bliká | Ovladač funguje normálně | |
| Jeden zelený indikátor a jeden červený indikátor | Nadproud řidiče | |
| Jeden zelený indikátor a dva červené indikátory | Přepětí vstupního výkonu ovladačetage | |
| Jeden zelený indikátor a tři červené indikátory | Vnitřní svtage ovladače je špatně | |
| Jeden zelený a čtyři červené indikátory | Chyba sledování překračuje limity | |
| Jeden zelený a pět červených indikátorů | Chyba fáze kodéru | |
Běžné závady a odstraňování závad
| Jev | Možné situace | Řešení |
| Motor nefunguje | Indikátor napájení nesvítí | Zkontrolujte napájecí obvod pro normální napájení |
| Rotor motoru je zablokován, ale motor nefunguje | Pulzní signál je slabý; zvyšte proud signálu na 7-16mA | |
| Rychlost je příliš nízká | Vyberte správné mikrokrokování | |
| Řidič je chráněn | Vyřešte poplach a znovu zapněte napájení | |
| Povolit problém se signálem | Vytáhněte nebo odpojte aktivační signál | |
| Příkazový impuls je nesprávný | Zkontrolujte, zda má horní počítač pulzní výstup | |
| Řízení motoru je špatné | Směr otáčení motoru je opačný | Nastavte DIP SW5 |
| Kabel motoru je odpojen | Zkontrolujte připojení | |
| Motor má pouze jeden směr | Chyba pulzního režimu nebo poškozený port DIR | |
| Indikátor alarmu svítí | Zapojení motoru je špatné | Zkontrolujte připojení motoru |
| Připojení motoru a snímače jsou nesprávné | Zkontrolujte pořadí připojení kodéru | |
| Voltage je příliš vysoké nebo příliš nízké | Zkontrolujte napájení | |
| Nesprávná poloha nebo rychlost | Signál je rušený | Eliminujte rušení pro spolehlivé uzemnění |
| Vstup příkazu je nesprávný | Zkontrolujte pokyny horního počítače, abyste se ujistili, že výstup je správný | |
| Nastavení Pulse na otáčku je špatné | Zkontrolujte stav DIP přepínačů a správně je připojte | |
| Signál kodéru je abnormální | Vyměňte motor a kontaktujte výrobce | |
| Terminál řidiče shořel |
Zkrat mezi svorkami obvod |
Zkontrolujte polaritu napájení nebo externí zkrat |
| Vnitřní odpor mezi svorkami je příliš velký | Zkontrolujte, zda na spojích vodičů není nějaká kulička pájky kvůli nadměrnému přidání pájky | |
| Motor je mimo tolerance |
Doba zrychlení a zpomalení je příliš krátká | Snižte zrychlení příkazu nebo zvyšte parametry filtrování ovladačů |
| Točivý moment motoru je příliš nízký | Vyberte motor s vysokým točivým momentem | |
| Náklad je příliš těžký | Zkontrolujte hmotnost a kvalitu nákladu a upravte mechanickou konstrukci | |
| Proud napájecího zdroje je příliš nízký | Vyměňte příslušný napájecí zdroj |
Dodatek A. Záruční doložka
A.1 Záruční doba: 12 měsíců
Poskytujeme záruku kvality po dobu jednoho roku od data dodání a bezplatnou údržbu našich produktů během záruční doby.
A.2 Vylučte následující:
- Nesprávné zapojení, jako je přepólování napájecího zdroje, a zasuňte/vytáhněte přípojku motoru, když je napájecí zdroj připojen.
- Nad rámec elektrických a ekologických požadavků.
- Změňte vnitřní zařízení bez povolení.
A.3 Proces údržby
Při údržbě produktů postupujte podle níže uvedených postupů:
- Chcete-li získat povolení k přepracování, kontaktujte náš personál zákaznického servisu.
- Písemný doklad o jevu selhání ovladače je přiložen ke zboží, dále kontaktní údaje a způsoby zasílání na odesílatele.
Poštovní adresa:
PSČ:
tel.:
szruitech.com
Dokumenty / zdroje
 |
Krokový ovladač s uzavřenou smyčkou RTELLIGENT T86-IO [pdfUživatelská příručka T86-IO, krokový ovladač s uzavřenou smyčkou, T86-IO krokový ovladač s uzavřenou smyčkou |



