Robot ROBOWORKS N10 Vzdělávací programovatelný mobilní robot

Specifikace
| Název produktu | Poměr snížení motoru | Maximální rychlost | Hmotnost | Maximální užitečné zatížení | Velikost | Minimální poloměr otáčení |
|---|---|---|---|---|---|---|
| Robot 2 | 1:27 | 1.3 m/s | 5.92 kg | 16 kg | 445 * 360 * 206 mm | 0.77 m |
| Rosbot Pro | 1:18 | 1.65 m/s | 19.54 kg | 35 kg | 774 * 570 * 227 mm | 1.02 m |
| Rosbot Plus | 1:18 | 2.33 m/s | 35.16 kg | 22 kg | 766 * 671 * 319 mm | 1.29 m |
Životnost baterie a napájení:
- Robot 2: Asi 9.5 hodiny (bez zatížení), Asi 8.5 hodiny (plné zatížení)
- Robot Pro: Asi 4.5 hodiny (bez zatížení), asi 3 hodiny (plné zatížení)
- Napájení: 24v 6000 mAh baterie + 3A proudová chytrá nabíječka
Systém řízení a řízení:
Mezi klíčové komponenty patří:
- Převodka řízení: S20F 20kg točivý moment digitální servo
- Kolečka: WH060 digitální servo s točivým momentem 60 kg, celopryžová kolečka o průměru 125 mm pro Rosbot 2, celopryžová kolečka o průměru 150 mm pro Robot Pro a
- Kodér: 500 řádkový vysoce přesný kodér fáze AB
- Závěsný systém: koaxiální kyvadlový závěsný systém pro robota 2, 4W nezávislý závěsný systém pro robota Pro a
- Ovládací rozhraní: Aplikace pro iOS a Android přes Bluetooth nebo Wifi, PS2, CAN, sériový port, USB
Úvod do ROS řadičů:
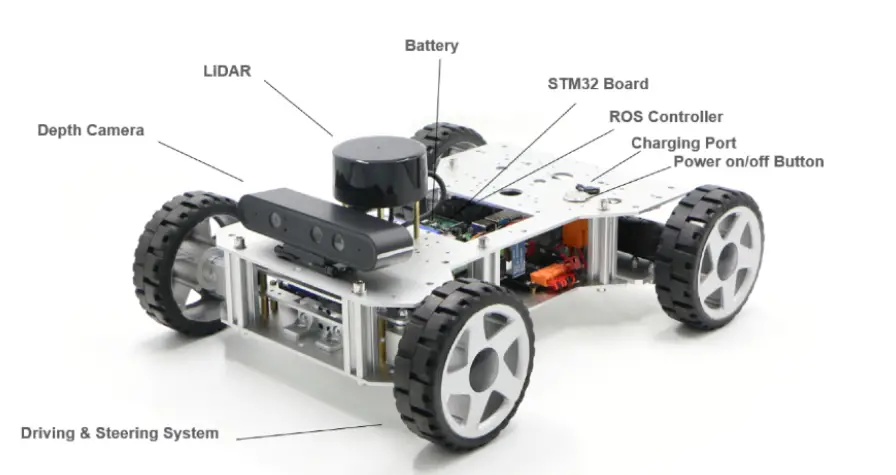
Všechny RRoboty jsou vybaveny hloubkovou kamerou Orbbec Astra pro různá použití včetně ovládání gesty, sledování kostry a 3D skenování.
Deska STM32:
Deska obsahuje jádro STM32F103RC s různými funkcemi včetně pamětí, hodin, resetování a správy zásob, napájení DMA, režim ladění, I/O porty, časovače a komunikační rozhraní.
Často kladené otázky
Otázka: Jak nabíjím baterii?
Odpověď: K nabíjení RRobot použijte dodanou 3A proudovou chytrou nabíječku s 24v 6000mAh baterií
Otázka: Jaká je výdrž baterie Rosbot Pro?
Odpověď: Robot Pro má výdrž baterie přibližně 4.5 hodiny bez zatížení a přibližně 3 hodiny při plném zatížení.
Otázka: Mohu ovládat Rosbot pomocí chytrého telefonu?
Odpověď: Ano, Rosbot můžete ovládat pomocí aplikace pro iOS a Android přes Bluetooth nebo Wifi.
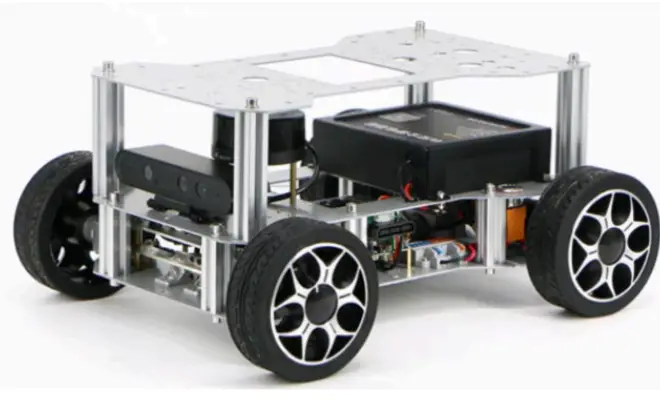
Klíčová složka
| Varia%on | Obraz |
| Robot 2 | 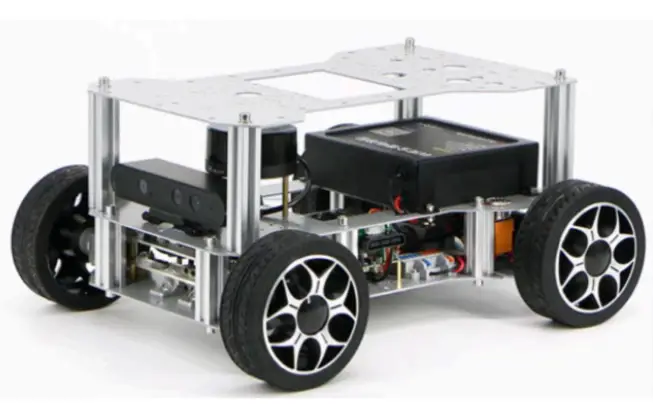 |
| Robot Pro |  |
| Robot Plus |  |
Specifikace produktu
|
Produktová matice |
 |
 |
 |
| Název produktu | Robot 2 | Robot Pro | Robot Plus |
| Poměr snížení motoru | 1:27 | 1:18 | 1:18 |
| Maximální rychlost | 1.3 m/s | 1.65 m/s | 2.33 m/s |
| Hmotnost | 5.92 kg | 19.54 kg | 35.16 kg |
| Maximální užitečné zatížení | 16 kg | 35 kg | 22 kg |
| Velikost | 445 * 360 * 206 mm | 774 * 570 * 227 mm | 766 * 671 * 319 mm |
| Minimální poloměr otáčení | 0.77 m | 1.02 m | 1.29 m |
| Životnost baterie | Asi 9.5 hodin (bez zatížení), Asi 8.5 hodin (plné zatížení) | Asi 4.5 hodin (bez zatížení), Asi 3 hodin (plné zatížení) | |
| Napájení | 24v 6000 mAh baterie + 3A proudová chytrá nabíječka | ||
| Převodovka řízení | Digitální servo S20F s točivým momentem 20 kg | WH060 digitální servo s točivým momentem 60 kg | |
| Kola | Plná gumová kolečka o průměru 125 mm | Plná gumová kolečka o průměru 150 mm | Nafukovací gumová kola o průměru 254 mm |
| Kodér | Vysoce přesný enkodér s 500 řádky fáze AB | ||
| Závěsný systém | Koaxiální kyvadlový závěsný systém | 4W nezávislý systém odpružení | |
| Ovládací rozhraní | Aplikace pro iOS a Android přes Bluetooth nebo Wifi, PS2, CAN, sériový port, USB | ||
Představení ROS Controllerů
Pro použití s RRobotem na platformě Vidia Jetson jsou k dispozici 2 typy ovladačů ROS. Jetson Orin Nano je vhodný spíše pro výzkum a vzdělávání. Jetson Orin NX je ideální pro prototypování produktů a komerční aplikace. Následující tabulka ukazuje hlavní technické rozdíly mezi různými ovladači dostupnými od Roboworks. Obě desky umožňují výpočty na vysoké úrovni a jsou vhodné pro pokročilé robotické aplikace, jako je počítačové vidění, hluboké učení a plánování pohybu.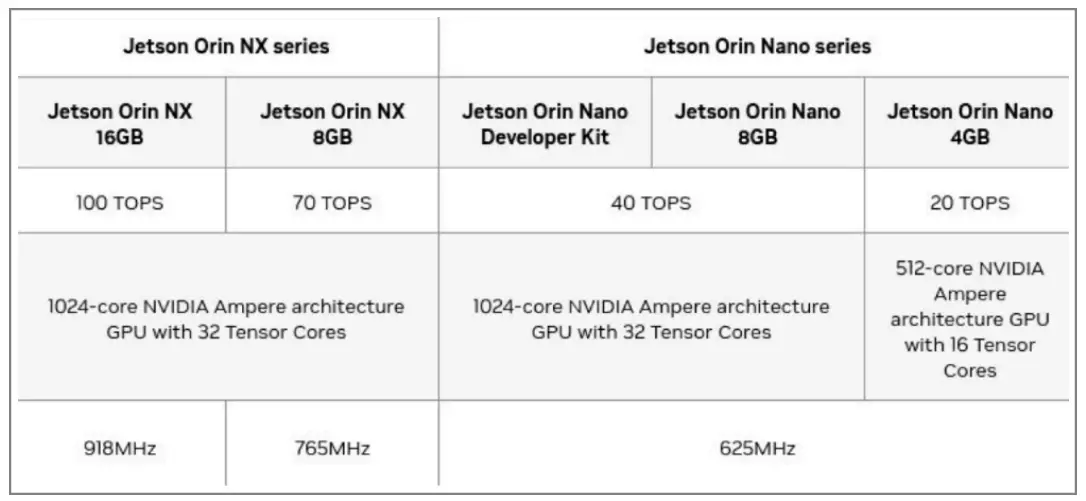
Snímací systém: LiDAR a hloubková kamera
Leishen LSLiDAR je nainstalován na všech variantách Rosbot s použitým modelem N10 nebo M10. Tyto LLiDAR nabízejí 3360-3360-stupňové skenování a vnímání okolí a mohou se pochlubit kompaktním a lehkým ESI. Mají vysoký poměr šumu signálu a vynikající detekční výkon na objektech s vysokou/nízkou odrazivostí a fungují dobře za silných světelných podmínek. Mají detekční dosah 30 metrů a skenovací frekvenci 12 Hz. Tento LiDAR se hladce integruje do robotů a zajišťuje, že ve vašem projektu lze snadno dosáhnout všech mapovacích a navigačních použití. Níže uvedená tabulka shrnuje technické specifikace posuvníků: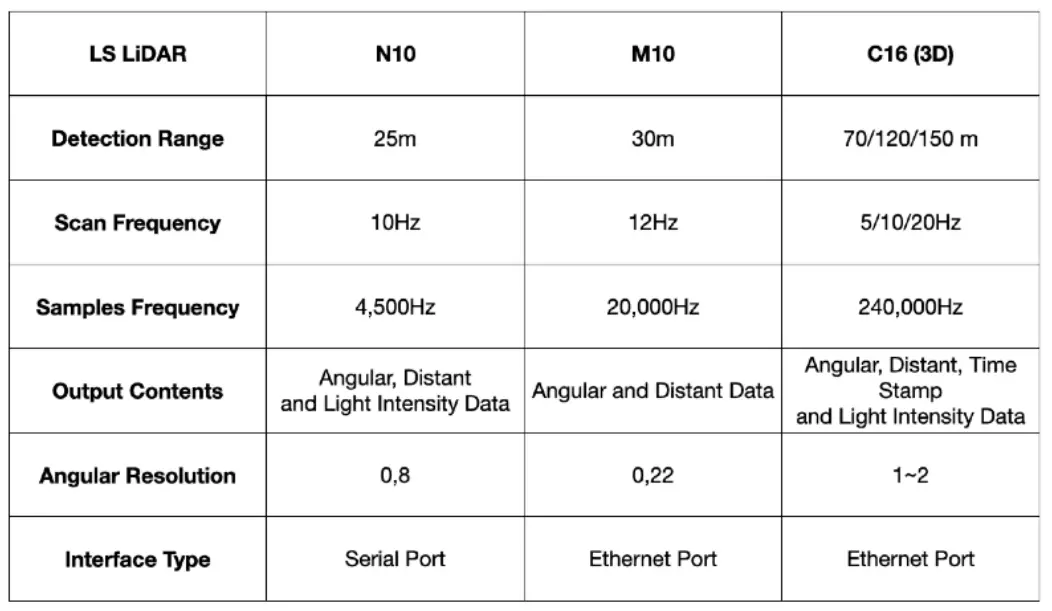
Kromě toho jsou všichni roboti vybaveni hloubkovou kamerou Orbbec Astra, což je kamera RGBD. Tato kamera je optimalizována pro řadu použití včetně ovládání gesty, sledování kostry, 3D skenování a vývoje mračna bodů. Následující tabulka shrnuje technické vlastnosti hloubkové kamery.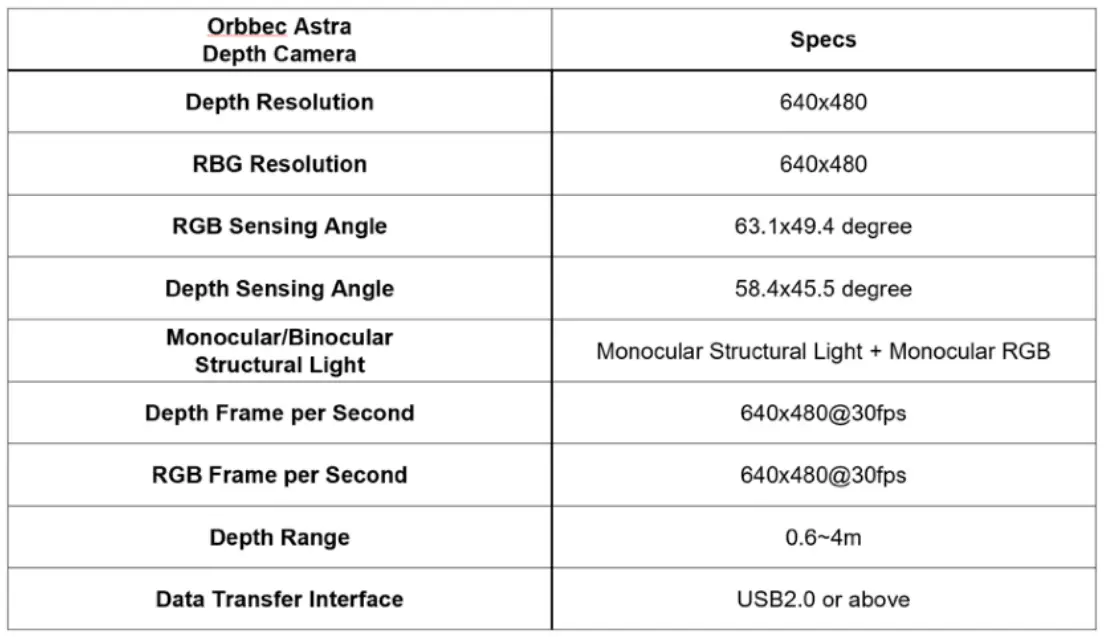
Deska STM32 (ovládání motoru, řízení spotřeby a IMU)
Deska STM32F103RC je mikrokontrolér používaný ve všech Rosbotech. Má vysoce výkonné jádro ARM Cortex-M3 32bitové RISC pracující na frekvenci 72 MHz spolu s vysokorychlostními vestavěnými pamětmi. Pracuje v teplotním rozsahu -40 °C až +105 °C a vyhovuje všem robotickým aplikacím v celosvětovém klimatu. Existují režimy úspory energie, které umožňují návrh aplikací s nízkou spotřebou. Některé z aplikací tohoto mikrokontroléru zahrnují motorové pohony, řízení aplikací, robotické aplikace, lékařské a ruční zařízení, PC a herní periferie, platformy GPS, průmyslové aplikace, video interkomy poplašného systému a skenery.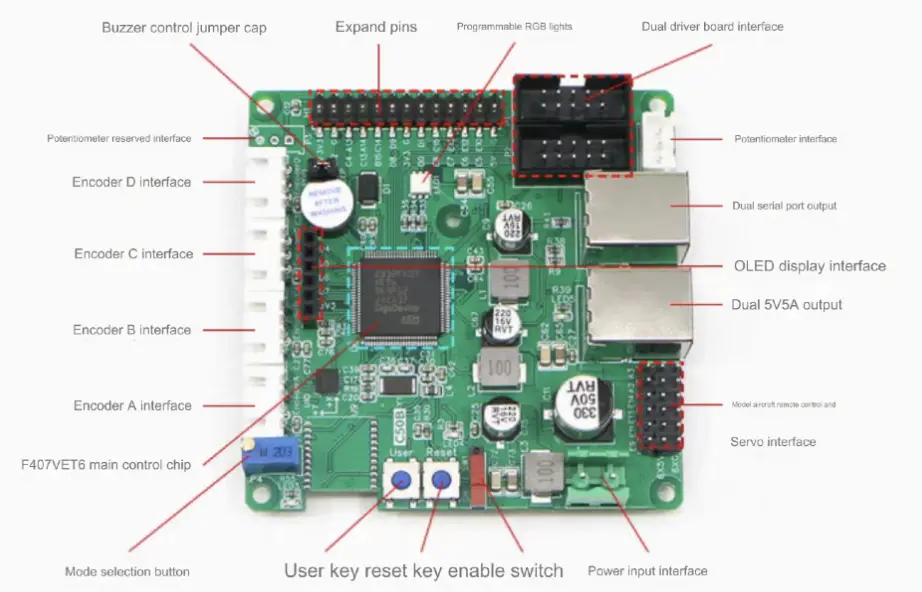
| STM32F103RC | Vlastnosti |
| Jádro | ARM32-bit Cortex –M3 CPU Maximální rychlost 72 MHz |
| Vzpomínky | 512 KB paměti Flash 64 kB SRAM |
| Hodiny, resetování a správa zásob | Napájení aplikace 2.0 až 3.6 V a vstupy/výstupy |
|
Moc |
Režimy spánku, zastavení a pohotovostního režimu
V napájení pro RTC a záložní registry NETOPÝR |
| DMA | 12kanálový řadič DMA |
| Režim ladění | SWD a JTAG rozhraní Cortex-M3 Embedded Trace Macrocell |
| I/O porty | 51 I/O portů (mapovatelné na 16 externích vektorů přerušení a 5V tolerantní) |
|
Časovače |
4×16bitové časovače
2 x 16bitové PWM časovače řízení motoru (s nouzovým zastavením) 2 x hlídací časovač (nezávislý a okenní) Časovač SysTick (24bitový down counter) 2 x 16bitové základní časovače pro řízení DAC |
|
Komunikační rozhraní |
Rozhraní USB 2.0 s plnou rychlostí SDIO rozhraní
Rozhraní CAN (2.0B aktivní) |
Systém řízení a řízení
Systém řízení a řízení je integrován s designem a konstrukcí robota. V závislosti na zakoupeném modelu se bude jednat o pohon 2 nebo 4 kol, přičemž obě varianty jsou vhodné pro různé výzkumné a vývojové účely. Kola na všech robotech jsou z plné pryže s pneumatikami se stupněm ochrany proti sněhu. K dispozici je koaxiální kyvadlový systém odpružení a řada Robotů je vybavena tlumiči nárazů s nezávislými systémy odpružení, které zajišťují úspěšnou navigaci v obtížném terénu.
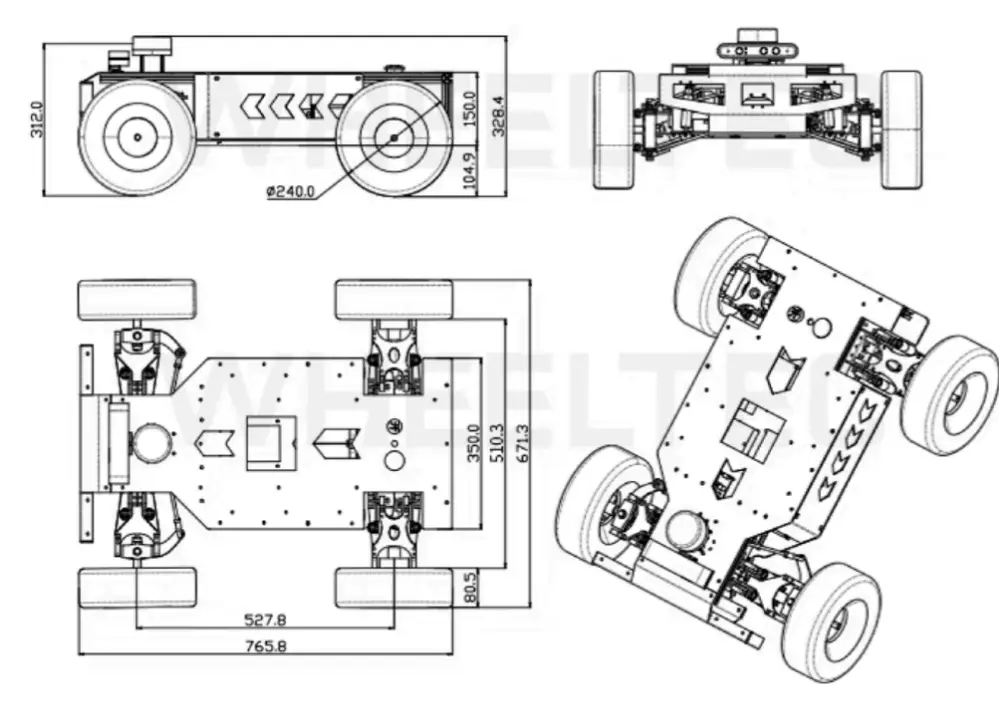
Technické specifikace řízení a řízení:
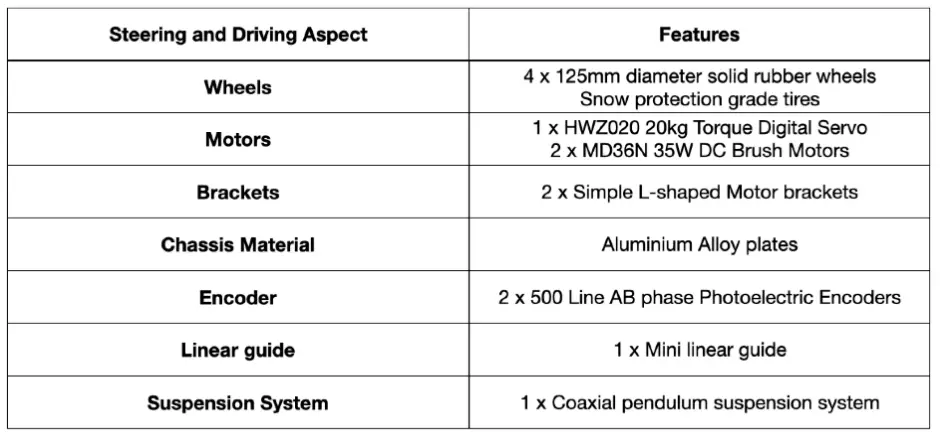
Schéma konstrukce podvozku robota:
Robot 2

Robot Pro
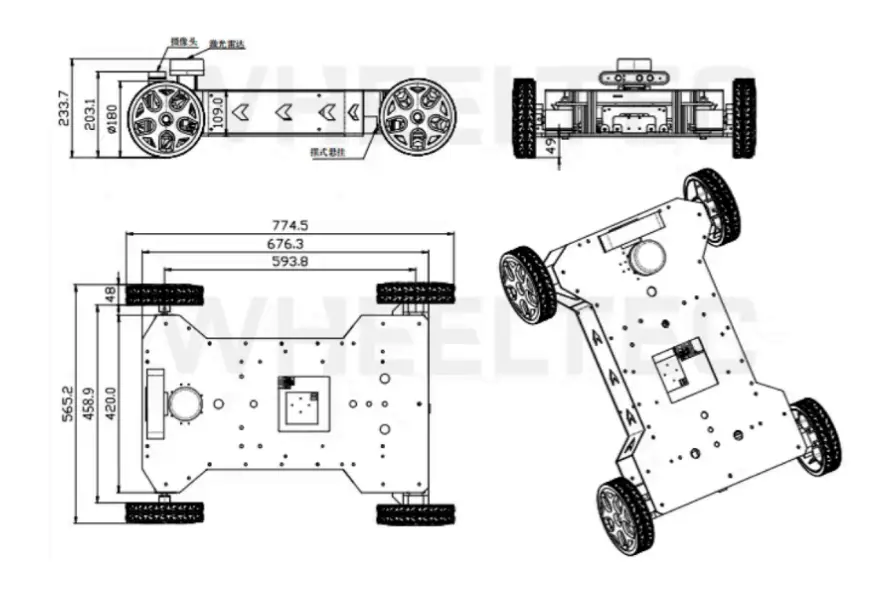
Robot Plus
Správa napájení
Power Mag – Magnetická baterie LFP:
Všechny Rosboty jsou dodávány s 6000 mAh Power Mag, magnetickou baterií LFP (Lithium Iron Phosphate) a nabíječkou. Zákazníci mohou za příplatek upgradovat baterii na 20000 XNUMX mAh. Baterie LFP jsou typem lithium-iontové baterie známé pro svou stabilitu, bezpečnost a dlouhou životnost. Na rozdíl od tradičních lithium-iontových baterií, které využívají kobalt nebo nikl, se LFP baterie spoléhají na fosforečnan železitý, čímž nabízejí udržitelnější a méně toxickou alternativu. Jsou vysoce odolné vůči tepelnému úniku, čímž snižují riziko přehřátí a požáru. Zatímco mají nižší energetickou hustotu ve srovnání s jinými lithium-iontovými bateriemi, baterie LFP vynikají odolností, delší životností, rychlejším nabíjením a lepším výkonem v extrémních teplotách, díky čemuž jsou ideální pro elektrická vozidla (EV) a systémy pro ukládání energie. Power Mag lze připevnit na jakýkoli kovový povrch robota díky designu magnetické základny. Díky tomu je výměna baterií rychlá a snadná.
Technické specifikace:
| Model | 6000 XNUMX mAh | 20000 XNUMX mAh |
| Baterie |
22.4V 6000mAh |
22.4V 20000mAh |
|
Materiál jádra |
Fosforečnan lithno-železitý |
Fosforečnan lithno-železitý |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Plný svtage |
25.55 V |
25.55 V |
| Nabíjecí proud | 3A | 3A |
| Materiál pláště |
Kov |
Kov |
| Výkon vybíjení | 15A trvalé vybíjení | 20A trvalé vybíjení |
|
Zástrčka |
Konektor DC4017MM samice (nabíjení) Konektor XT60U-F samice (vybíjení) |
Konektor DC4017MM samice (nabíjení) Konektor XT60U-F samice (vybíjení) |
|
Velikost |
177 * 146 * 42 mm |
208 * 154 * 97 mm |
|
Hmotnost |
1.72 kg |
4.1 kg |
Ochrana baterie
Zkrat, nadproud, přebití, ochrana proti nadměrnému vybití, podpora nabíjení při používání, vestavěný bezpečnostní ventil, deska zpomalující hoření.
Automatická nabíjecí stanice (Power+):
Auto Charging Station je součástí modelu Rosbot 2+ a lze ji zakoupit samostatně pro práci s Rosbot 2, Rosbot Pro a Rosbot Plus.
ROS 2 Rychlý start
Když je robot poprvé zapnut, je ve výchozím nastavení řízen systémem ROS. To znamená, že deska ovladače podvozku STM32 přijímá příkazy z ovladače ROS 2 – Jetson Orin. Počáteční nastavení je rychlé a snadné, z hostitelského počítače (doporučeno Ubuntu Linux) se připojte k hotspotu Wi-Fi robota. Výchozí heslo je „Dongguan“. Dále se připojte k robotu pomocí SSH přes Linuxterminatee l, adresa P je 192.168.0.10 a 0 a výchozí heslo je Dongguan.
S terminálovým přístupem k robotovi můžete přejít do složky pracovního prostoru ROS 2 pod „wheeltec_ROS 2“ Před spuštěním testovacích programů přejděte na wheeltec_ROS 2/turn_on_wheeltec_robot/ a vyhledejte wheeltec_udev.sh – Tento skript je nutné spustit, obvykle pouze jednou. zajistit správnou konfiguraci periferií. Nyní můžete otestovat funkčnost robota a spustit funkci ovladače ROS 2 spuštěním: „relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch“
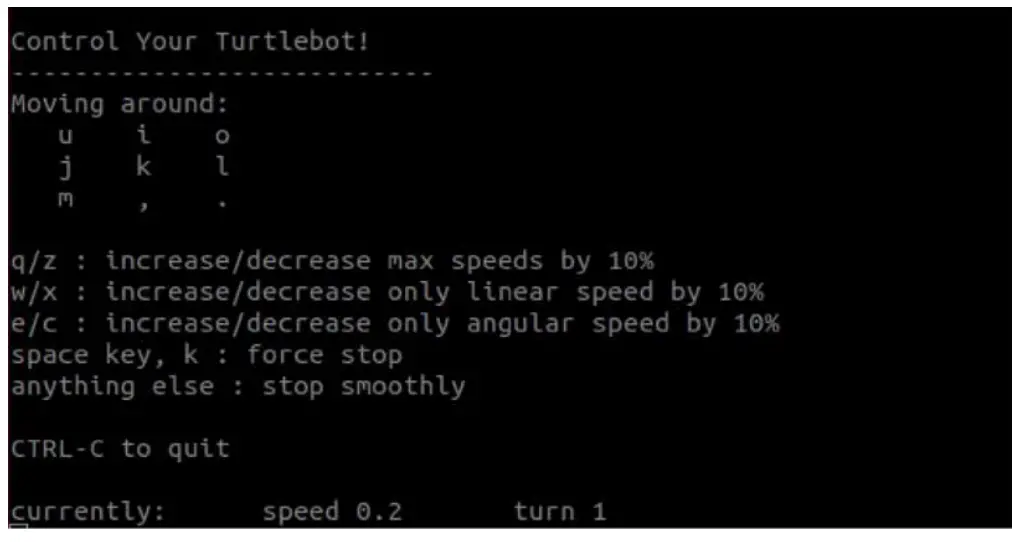
V druhém terminálu můžete použít uzel keyboard_teleop k ověření ovládání podvozku, jedná se o upravenou verzi oblíbeného ROS 2 Turtlebot example. Zadejte: „relaunch wheeltec_robot_rc keyboard_teleop.launch“
Předinstalované balíčky ROS 2 Humble
Níže jsou uvedeny následující uživatelsky orientované balíčky, i když mohou být přítomny jiné balíčky, jedná se pouze o závislosti.
- turn_on_wheeltec_robot
Tento balíček je zásadní pro umožnění funkčnosti robota a komunikace s řídicí jednotkou podvozku. Primární skript „turn_on_wheeltec_robot.launch“ musí být použit při každém spouštění pro konfiguraci ROS 2 a ovládání ovladače. - wheeltec_rviz2
Obsahuje spuštění files spustit viz s vlastní konfigurací pro Pickerbot Pro. - wheeltec_robot_slam
Balíček mapování a lokalizace SLAM s vlastní konfigurací pro Pickerbot Pro. - wheeltec_robot_rrt2
Rychlé prozkoumání algoritmu náhodného stromu – Tento balíček umožňuje Pickerbot Pro naplánovat cestu k požadovanému umístění spuštěním průzkumných uzlů. - wheeltec_robot_keyboard
Praktický balíček pro ověřování funkčnosti robota a ovládání pomocí klávesnice, a to i ze vzdáleného hostitelského počítače. - wheeltec_robot_nav2
Balíček uzlů ROS 2 Navigation 2. - wheeltec_lidar_ros2
Balíček ROS 2 Lidar pro konfiguraci Leishen M10/N10. - wheeltec_joy
Balíček ovládání joystickem obsahuje spouštění files pro uzly joysticku. - simple_follower_ros2
Základní algoritmy sledování objektů a čar pomocí laserového skenování nebo hloubkové kamery. - ros2_astra_camera
Balíček hloubkové kamery Astra s ovladači a spuštěním files.
Shrnutí
Robot je určen pro vývojáře, pedagogy a studenty ROS (Robot Operating System). Srdcem Rosbotu je plně programovatelný softwarový framework a konfigurovatelná hardwarová architektura založená na nejpopulárnější robotické platformě – ROS.
Robot je dostupný ve třech kategoriích:
- Robot 2 – Vhodné pro začátečníky ROS a nízkorozpočtové projekty.
- Robot Pro – Vhodné pro vývojáře ROS a pedagogy, kteří potřebují všestranný systém pro rychlé prototypování nebo výuku.
- Rosbot Plus – Toto je verze 4WD Rosbot s nezávislými systémy odpružení. Tato kategorie je dostatečně závažná, aby byla zvážena pro průmyslový a komerční rozvoj. Robot je dodáván s oblíbenými ovladači ROS, jako jsou:
- Jetson Orin Nano
- Jetson Orin NX
Připravil: Wayne Liu, Reilly Smithers & Tara Hercz 30. září 2024
Verze #: 20240930
Dokumenty / zdroje
 |
Robot ROBOWORKS N10 Vzdělávací programovatelný mobilní robot [pdfUživatelská příručka Robot N10 Vzdělávací programovatelný mobilní robot, N10, Robot Vzdělávací programovatelný mobilní robot, Vzdělávací programovatelný mobilní robot, Programovatelný mobilní robot, Mobilní robot, Robot |