Image Engineering STEVE-6D Uživatelská příručka

1 ÚVOD
Software STEVE-6D vyhodnocuje výkon stabilizace obrazu digitálních fotoaparátů. Následující obrázek ilustruje exampnastavení pro analýzu nízko kontrastních šikmých hran pomocí testovacího grafu TE261. Kamera je namontována na STEVE-6D a poté vibruje, zatímco se zapíná a vypíná funkce stabilizace obrazu kamery, aby se pořídily snímky v různých expozičních časech. Odtud software analyzuje šířku okraje rozmazaných šikmých okrajů a poté vypočítá výkon stabilizace v clonových bodech. Tento software může také ovládat iQ-Trigger a hardware STEVE-6D pomocí generátoru sinusových vln, vlastních uživatelských křivek nebo vlastního handshake CIPA.

STEVE-6D – řešení na klíč
GRAFICKÉ UŽIVATELSKÉ PROSTŘEDÍ
Software STEVE-6D je rozdělen do dvou hlavních modulů, jeden pro komunikaci s hardwarem STEVE-6D a druhý pro výpočet výkonu stabilizace obrazu [1].

Modul pro kontrolu vibrací STEVE-6D
Modul pro řízení vibrací
Modul „VIBRATION CONTROL“ nastavuje data průběhu a spravuje rozhraní mezi
STEVE-6D a iQ-Trigger. „OVLÁDÁNÍ VIBRACÍ“ je rozděleno do čtyř různých částí, první část [2] přepíná mezi následujícími kartami.
Záložka Připojení
Chcete-li získat spojení se STEVE-6D, klikněte na tlačítko „Připojit“ [1] a STEVE-6D automaticky nastaví všech šest os na pozici nula. Pro odpojení klikněte na červené tlačítko [2]
že jo. Najetím kurzoru myši na informační položku [3] se v popisku zobrazí informace o připojeném ovladači, jako je sériové číslo a verze firmwaru.

Záložka Připojení
Karta Předvolby
Kamerový systém lze snadno vyrovnat definováním bodu otáčení, známého jako bod otáčení [1], a místní výchozí/nulovou polohu [2]. Každá datová křivka průběhu se vztahuje k této poloze.
Výchozí bod otáčení (x=y=z=0) je umístěn ve středu spodní části přídržné desky. Jeho polohu můžete změnit na to, co je pro vaši aplikaci nejlepší. NapřampU mobilního telefonu má smysl nastavit otočný bod na střed telefonu, protože to je obvykle střed otáčení, když jej uživatel drží. Zrcadlovka má však pravděpodobně jiný střed otáčení kvůli velmi odlišné geometrii

Karta Předvolby
Záložka Sinusový průběh
Generátor sinusových vln pro každou osu vytváří rychlý způsob nastavení dat průběhu. Chcete-li definovat nový průběh, změňte hodnoty offsetu týkající se polohy [2], frekvence [3], ampLitude [4] a
časový posun [5]. Spin box „Cycles“ [6] definuje, jak často se má sinus opakovat. Pro provedení křivky klikněte na tlačítko „MOVE“. Klikněte na tlačítko v pravém dolním rohu [7].
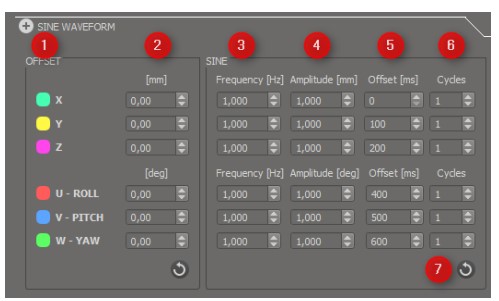
Záložka Sinusový průběh
Karta handshake CIPA
Chcete-li provést kterýkoli ze tří CIPA handshake, nejprve vyberte hmotnost optického systému. Odtud se data tvaru vlny automaticky nahrají do ovladače STEVE-6D a začne pohyb
po kliknutí na tlačítko MOVE. Vzhledem k dohodě CIPA o mlčenlivosti je „PLOT VLNOVÝCH PLOT“ pouze example
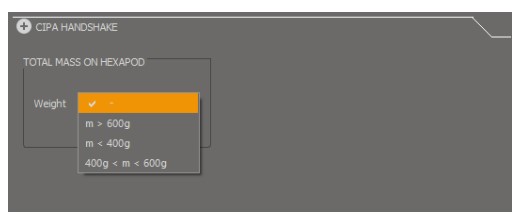
CIPA karta handshake
Karta Vlastní křivka
Standardním průběhem
Nahrajte vlastní křivku do STEVE-6D vytvořením jednoduchého .txt file s kartézskými souřadnicemi. Všechny hodnoty musí být odděleny zarážkou tabulátoru. Pořadí os je XYZUV W. Nastavte samprychlost záznamu průběhu v softwaru STEVE-6D a poté načtěte .txt file do softwaru. Všechny souřadnice jsou bez ohledu na otočný bod a výchozí pozici. Nahrávání křivky se spustí automaticky po .txt file se nahraje do softwaru STEVE-6D. File definice pro standardní průběh: (jako oddělovač použijte tabulátor)

Podle prostorových dat
Použijte data z prostorových senzorů při analýze zařízení, jako jsou chytré telefony (akcelerometr, gyroskop, magnetometr). Chcete-li získat přesnější hodnoty rotace, nastavte parametr pro variantu Acc/Mag & Gyr.
The ampLitude gain je pouze pro škálování amplitude. Po nastavení všech parametrů zahajte pohyb kliknutím na tlačítko nahrát do hexapodu. Pokračovací zaškrtávací políčko umožní uživateli nastavit dobu trvání průběhu, pokud se počáteční poloha liší od koncové polohy. Nechybí ani možnost používat pouze data akcelerometru nebo gyroskopu.
Tlačítko exportovat průběh lze použít k uložení průběhu a pro výpočet výkonu IS. Údaje sampfrekvence je 1000 Hz
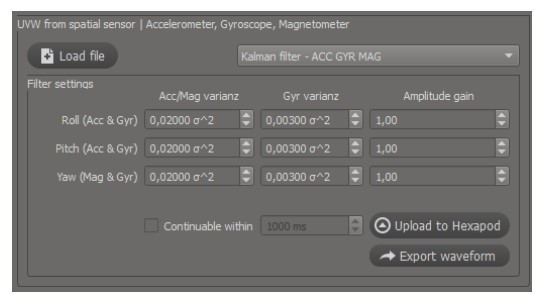
Nastavení prostorového senzoru
File definice pro UVW z prostorového senzoru:
| HH:MM:SS.ZZZZ | AccX[g] | AccY[g] | AccZ[g] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | Mag[µt] | Mag[µt] | Mag[µt] |
Spouštěcí karta
Vzdálené spuštění kamery lze provést pomocí iQ-Trigger. Je možné definovat více časů uvolnění kliknutím na “WAVEFORM PLOT” nebo ručním výběrem času na záložce iQ-Trigger [3]. Pokud je potřeba náhodný čas uvolnění, definujte počet uvolnění na křivku [2]. Každé spuštění iQ-Trigger je definováno zpožděním snímání, dobou trvání spuštění a dobou delta mezi dvěma spuštěními fotoaparátu [1].

Svislé čáry označují časy uvolnění Digitus
Odeslat na hardware, stav a počet snímků/křivek
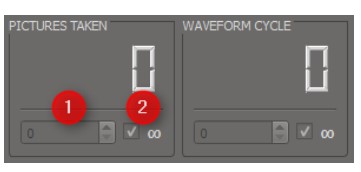
Všechny informace o stavu připojení nebo chybách se zobrazují v oblasti „STATUS“. Chcete-li spustit pohyb, stiskněte tlačítko „MOVE“. Kliknutím na tlačítko „Home Position“ se STEVE-6D přesune přímo do výchozí pozice, která byla dříve nastavena v záložce „PRESETS“. Pokud je nutné překalibrovat STEVE-6D, klikněte na tlačítko „Referenční platforma“. Při definování hodnoty pro „PICTURE TAKEN“ nebo „WAVEFORM CYCLE“ je možné automaticky zastavit pohyb STEVE-6D. Nastavte hodnotu na neomezeno [2] nebo zvolte hodnotu pro počet impulzů [1], které má spustit iQ-Trigger nebo křivku provést.
Analyzujte data
Modul „Analyze Data“ provádí výpočet stabilizace obrazu. Tento modul má tři významné části. První částí je „Nástroj metadat“ [1], který nastavuje metadata kamery. Druhý
součástí je dávkové zpracování obrazu pro výpočet IS-Performance [2]. Poslední část zobrazuje výsledky pořízených snímků.
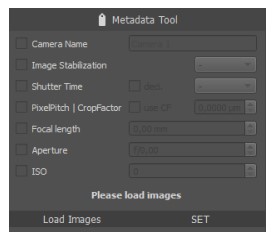
Metadata
Je nezbytné mít informace o metadatech fotoaparátu pro výpočty IS-Performance, jako je rozteč pixelů a čas závěrky. Pokud kamera tuto informaci do snímku nezaznamená file, načtěte dávku obrázků a ručně je zapište do obrázku .jpg. Načtěte obrázky, nastavte parametry a poté stiskněte tlačítko „SET“.
POUZE PRO OBRÁZKY JPEG
Načtěte obrázky pro výpočet IS-Performance
Po načtení referenční série vyberte testovací sérii pro IS-ON. Je vyžadována alespoň jedna série snímků pro ISOFF. Pokud byla použita křivka handshake CIPA, testovací série pro IS-OFF není potřeba.
Místo toho klikněte na tlačítko CIPA a poté vyberte hmotnost kamery. Snímky z měření uživatelských křivek lze načíst kliknutím na tlačítko uživatelských dat pohybu. „Centrum analýzy obrazu
pouze“ je k dispozici pro rychlejší, ale méně přesná data. Při výběru této možnosti se při výpočtu použije pouze střední okraj.

Jakmile jsou možnosti vybrány, strom view z různých řad se zobrazí, jak je vidět níže. Pokud nejsou k dispozici žádná metadata obrázku, použijte „Nástroj metadat“, který je označen chybovou zprávou
po načtení snímků do softwaru STEVE-6D. Po dokončení lze výpočet výkonu stabilizace obrazu spustit kliknutím na tlačítko „Zpracovat“. Výsledek file s výpočty šířky jedné hrany se uloží do složky s obrázky.
| Doba vypršení [s] | Rozteč [pix] | Yaw [pix] | Sqrt(p^2+y^2) |
IS-Výkon
Šířka okraje vypočítává IS-Performance v μm vs. expoziční čas. Šířky okrajů sérií ISON a IS-OFF (nebo pohybových dat) jsou převedeny na velikost pohlednice s viewvzdálenost 65-80 cm k provedení tohoto procesu. Výkon stabilizace obrazu v clonových bodech [2] se nachází u průsečíků křivky IS-ON a IS-OFF s mezí stanovení 63μm [1]. Číselná hodnota IS-Performance se zobrazuje v clonových bodech.

Výběr dat výsledků
Chcete-li vybrat jednotlivé výsledky výpočtu IS-Performance, posuňte jeden z posuvníků [1] pro „SERIES“
„EXPOSURE TIME“, „PICTURE“ nebo „ROI“ (oblast zájmu). Tento pohyb změní zobrazené
výsledky pro funkci okrajového rozpětí („ESF“) [3], prostorovou frekvenční odezvu („SFR“) [4] a
Záložka „VLOŽTE OBRÁZEK“ [5]. Podrobné informace lze zobrazit nebo skrýt pomocí tlačítka „INFO“ [6].

Funkce okrajového roztažení (ESF)
ESF vypočítá každou šířku hrany. Tedy oversampled šikmý okraj snímku ROI se vypočítá z každého snímku. Každý obrázek obsahuje dvacet šikmých hran, včetně deseti v rozteči a
deset ve směru vybočení.
Prostorová frekvenční odezva (SFR)
SFR se nepoužívá pro výpočet IS-Performance. Místo toho popisuje modulační přenosovou funkci každé ROI.
Vstupní obrázek a výběr ROI
Pro každý výsledek je možné změnit nebo zobrazit oblast zájmu. Klikněte na tlačítko „Upravit ROI“ a změňte umístění ROI. Chcete-li nastavit novou oblast zájmu, klikněte na tlačítko a pomocí tlačítka „-“ odstraňte oblast zájmu. Pro efekt přiblížení klikněte na tlačítko „Zoom +“ a nakreslete na obrázek obdélník.
Zpracování chyb
Pokud software nezjistí všech 20 ROI na jednom ze snímků, došlo k chybě během seznamu vstupních snímků. view. Pokud k tomu dojde, vyberte snímek a ručně definujte chybějící ROI pro snímek.
CAUTORSKÁ PRÁVA INFORMACE
Instalací tohoto softwaru přijímáte a souhlasíte s tím, že budete vázáni podmínkami licenční smlouvy na software, které jsou uvedeny níže.
Copyright © Image Engineering GmbH & Co. KG, 2021
Software poskytovaný na základě této smlouvy je poskytován „tak, jak je“, bez jakýchkoli záruk nebo prohlášení výslovných nebo předpokládaných, včetně, ale bez omezení na jakékoli předpokládané záruky prodejnosti nebo vhodnosti pro konkrétní účel. Za určení vhodnosti softwaru pro konkrétní účel nebo použití je výhradně odpovědný spotřebitel. Společnost Image Engineering GmbH & Co.
KG a kdokoli jiný, kdo se podílel na vytváření, výrobě, dodávce nebo podpoře tohoto softwaru, nebude v žádném případě odpovědný za přímé, nepřímé, zvláštní, následné nebo náhodné škody vyplývající z jakékoli vady, chyby nebo opomenutí. na disketě nebo softwaru nebo z jakýchkoli jiných událostí, včetně, ale bez omezení, jakéhokoli přerušení služby, ztráty zisku nebo dobrého jména, právního jednání nebo jakýchkoli jiných následných škod. Uživatel přebírá veškerou odpovědnost vyplývající z používání tohoto softwaru, za což společnost Image Engineering GmbH & Co. KG nenese žádnou odpovědnost, bez ohledu na to, zda je takové použití zákonné nebo předvídatelné. Image Engineering GmbH & Co. KG nenese žádnou odpovědnost za jakákoli data nebo programy uložené tímto softwarem nebo s ním používané, včetně nákladů na obnovu takových dat nebo programů. Image Engineering GmbH & Co. KG si vyhrazuje právo provádět opravy nebo vylepšení poskytovaných informací a souvisejícího softwaru kdykoli bez upozornění.
Přečtěte si více o této příručce a stáhněte si PDF:
Dokumenty / zdroje
 |
Image Engineering STEVE-6D [pdfUživatelská příručka STEVE-6D, STEVE |



